智能化與自適應控制:運動控制器將越來越多地集成智能算法和自適應控制功能,能夠根據實時的運行狀態和環境變化,自動調整控制參數和策略。例如,通過機器學習算法對設備的運行數據進行分析和預測,提前進行故障診斷和維護,提高系統的可靠性和穩定性。與人工智能和機器視覺深度融合:與人工智能技術結合,運動控制器可以實現更高級的功能,如路徑規劃、自主決策等。與機器視覺系統集成,能夠實時獲取物體的位置和姿態信息,實現基于視覺反饋的精確運動控制,拓寬應用領域和功能。模塊化設計的運動控制器,升級拓展輕松,未來可適配更多復雜工業場景。同芯運動控制器是干嘛的
自動化立體倉庫:國產運動控制器可控制堆垛機、穿梭車等設備在立體倉庫中的運行,實現貨物的自動存儲和檢索。通過精確的位置控制和速度調節,提高倉儲空間的利用率和貨物出入庫的效率。物流分揀系統:在快遞、電商等行業的物流分揀中心,運動控制器控制分揀機器人和分揀設備的運動,根據貨物的信息快速準確地將其分揀到相應的位置,有效提高了分揀效率和準確性。
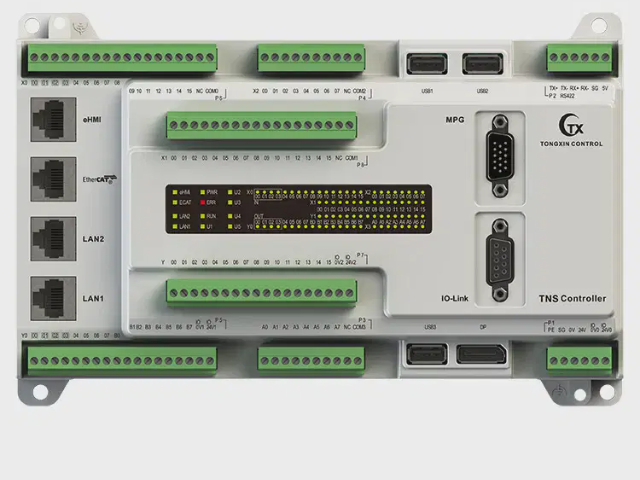
近年來,隨著技術的不斷進步和性能的逐步提升,國產運動控制器憑借高性價比、本地化服務等優勢,在多個領域的應用越來越活躍。 國產運動控制器和運動控制卡運動控制器如精密指揮家,高效調控機械運動軌跡,確保設備運行穩定、動作精確無誤。

電機類型:常見的電機類型有步進電機、伺服電機等。步進電機成本較低,適用于對精度要求不太高的場合;伺服電機則具有更高的精度、速度和轉矩特性,適用于高精度、高動態性能的應用。選擇運動控制器時,要確保其與所使用的電機類型兼容。功率匹配:運動控制器的功率輸出要與電機的功率相匹配。如果功率不匹配,可能會導致電機無法正常運行,甚至損壞運動控制器或電機。。。
選擇適合自己的運動控制器需要綜合考慮多個因素。。。。。
運動程序編寫:編程語言選擇:根據運動控制器的支持情況,選擇合適的編程語言進行運動程序編寫。常見的編程語言包括梯形圖、指令表、C 語言、Python 等。運動指令編寫:在編程語言中,使用相應的運動指令來控制電機的運動。運動指令包括點動、定位、插補等。根據實際需求,編寫合適的運動指令,以實現所需的運動軌跡和動作。程序調試:在編寫完運動程序后,進行程序調試。調試過程中,可以使用控制軟件提供的調試工具,如單步運行、斷點調試等,來檢查程序的正確性和運動控制器的運行狀態。根據調試結果,對程序進行修改和優化,直到滿足要求為止。同芯運動控制器通過總線通信,實時同步多軸運動,保障了生產線設備的穩定高速運轉。

位置檢測與反饋:為了實現精確的運動控制,運動控制器需要實時了解運動部件的實際位置。這通常通過位置傳感器來實現,常見的位置傳感器有編碼器(如增量式編碼器、絕對式編碼器)、光柵尺等。編碼器安裝在電機軸或運動部件上,隨著電機的轉動或部件的移動,編碼器會產生相應的脈沖信號或數字編碼,這些信號被反饋給運動控制器。控制器將接收到的反饋信號與指令中的目標位置進行比較,計算出位置偏差。
運動控制器是一種專門用于控制運動軸的位置、速度和加速度等參數的設備。 在不同應用場景下運動控制器的作用有何差異?廣東同芯運動控制器廠家
隨著工業 4.0 和智能制造的推進,運動控制器正朝著標準化和開放化的方向發展。同芯運動控制器是干嘛的
信號輸出驅動信號生成:經過信號處理后,運動控制器會生成相應的驅動信號。對于不同類型的電機,驅動信號的形式也有所不同。例如,對于步進電機,運動控制器會輸出脈沖信號來控制電機的步數和方向;對于伺服電機,運動控制器會輸出模擬電壓信號或數字脈沖信號來控制電機的轉速和轉矩。功率放大:由于運動控制器輸出的驅動信號功率通常較小,無法直接驅動電機,因此需要通過功率放大器對驅動信號進行放大。功率放大器將低功率的驅動信號轉換為高功率的電流或電壓信號,以提供足夠的能量來驅動電機運行。同芯運動控制器是干嘛的