
plc系統(tǒng)控制價格 服務(wù)至上 深圳市同芯智控技術(shù)供應(yīng)
發(fā)貨地點:廣東省深圳市
發(fā)布時間:2025-03-24

發(fā)貨地點:廣東省深圳市
發(fā)布時間:2025-03-24
閉環(huán)控制反饋調(diào)節(jié):電機在驅(qū)動信號的作用下開始運行,傳感器會實時監(jiān)測電機的實際運行狀態(tài),并將反饋信號再次傳輸給運動控制器。運動控制器會不斷比較指令信號和反饋信號,根據(jù)偏差實時調(diào)整驅(qū)動信號,形成一個閉環(huán)控制系統(tǒng)。通過閉環(huán)控制,可以有效提高電機控制的精度和穩(wěn)定性,補償電機運行過程中的各種干擾和誤差。例如,當(dāng)電機受到負載變化的影響導(dǎo)致速度下降時,運動控制器會根據(jù)反饋信號增加驅(qū)動信號的強度,使電機恢復(fù)到設(shè)定的速度。同芯運動控制器以納米級精度運行,多軸聯(lián)動順滑無卡頓,復(fù)雜任務(wù)高效搞定,遠超同行。plc系統(tǒng)控制價格
電機類型:常見的電機類型有步進電機、伺服電機等。步進電機成本較低,適用于對精度要求不太高的場合;伺服電機則具有更高的精度、速度和轉(zhuǎn)矩特性,適用于高精度、高動態(tài)性能的應(yīng)用。選擇運動控制器時,要確保其與所使用的電機類型兼容。功率匹配:運動控制器的功率輸出要與電機的功率相匹配。如果功率不匹配,可能會導(dǎo)致電機無法正常運行,甚至損壞運動控制器或電機。。。
選擇適合自己的運動控制器需要綜合考慮多個因素。。。。。 plc 電氣控制柜模塊化設(shè)計的運動控制器,升級拓展輕松,未來可適配更多復(fù)雜工業(yè)場景。

控制算法:不同的控制算法對運動控制的性能有很大影響。常見的控制算法有 PID 控制、模糊控制、神經(jīng)網(wǎng)絡(luò)控制等。PID 控制算法簡單實用,適用于大多數(shù)工業(yè)應(yīng)用;而對于一些復(fù)雜的非線性系統(tǒng),模糊控制或神經(jīng)網(wǎng)絡(luò)控制可能能提供更好的控制效果。響應(yīng)速度:響應(yīng)速度決定了運動控制器對輸入信號的反應(yīng)快慢。在需要快速啟停和頻繁加減速的應(yīng)用中,如高速包裝機,要求運動控制器具有較高的響應(yīng)速度,以確保設(shè)備能夠高效穩(wěn)定地運行。采樣頻率:采樣頻率越高,運動控制器能夠更及時地獲取反饋信息,從而實現(xiàn)更精確的控制。在高精度運動控制場合,如精密加工設(shè)備,需要較高的采樣頻率來保證控制精度。
同芯運動控制器是一種專門用于控制運動設(shè)備和系統(tǒng)的電子裝置。它就像是運動系統(tǒng)的 “大腦”,負責(zé)協(xié)調(diào)和管理各種運動參數(shù),如位置、速度、加速度等,以確保運動部件能夠按照預(yù)定的軌跡和要求精確地運動。無論是在工業(yè)自動化領(lǐng)域,如機器人手臂的精確操作、數(shù)控機床的精密加工,還是在智能家居、醫(yī)療器械等其他領(lǐng)域,運動控制器都起著至關(guān)重要的作用,它為實現(xiàn)各種復(fù)雜的運動控制任務(wù)提供了重要的控制能力。。。。。。。。。。。。。運動控制器是自動化設(shè)備的主要結(jié)構(gòu),精確調(diào)控機械動作,讓生產(chǎn)流程高效又穩(wěn)定。

同芯運動控制器采用先進控制策略應(yīng)用:除了傳統(tǒng)的 PID 控制算法,研究和應(yīng)用更多先進的控制策略,如模糊控制、神經(jīng)網(wǎng)絡(luò)控制、自適應(yīng)控制等。這些算法能夠更好地處理系統(tǒng)的非線性、不確定性和時變性,提高運動控制器的控制精度和動態(tài)性能。在機器人控制中,采用神經(jīng)網(wǎng)絡(luò)控制算法可以使機器人更好地適應(yīng)復(fù)雜的環(huán)境和任務(wù)要求,實現(xiàn)更靈活、精細的運動。多軸協(xié)同控制算法優(yōu)化:隨著多軸運動控制需求的增加,優(yōu)化多軸協(xié)同控制算法是關(guān)鍵。通過研發(fā)更高效的同步控制算法,減少多軸之間的運動誤差和耦合干擾,實現(xiàn)多軸的高精度同步運動。在數(shù)控機床的多軸聯(lián)動加工中,精確的多軸協(xié)同控制可以提高加工效率和產(chǎn)品質(zhì)量。運動控制器支持多模式切換,能在點位、連續(xù)軌跡控制間靈活轉(zhuǎn)換,滿足多樣生產(chǎn)需求。plc控制器匯川
自帶故障診斷的運動控制器,可快速定位問題并預(yù)警,縮短維修時間,保障生產(chǎn)不停。plc系統(tǒng)控制價格
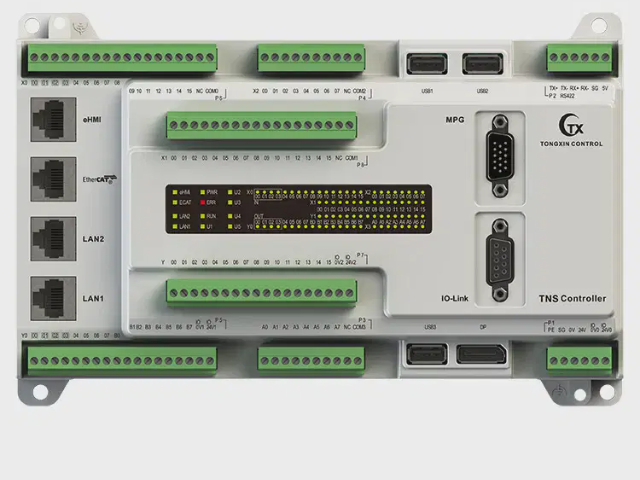
基于PC總線的以DSP和FPGA作為主要處理器的開放式運動控制器,同芯運動控制器以DSP芯片作為運動控制器的主要處理器,以PC機作為信息處理平臺,運動控制器以插卡形式嵌入PC機,即“PC+運動控制器”的模式。這樣將PC機的信息處理能力和開放式的特點與運動控制器的運動軌跡控制能力有機結(jié)合在一起,具有信息處理能力強、開放程度高、運動軌跡控制準確、通用性好的特點。同芯控制器充分利用了DSP的高速數(shù)據(jù)處理能力和FPGA的強大邏輯處理能力,便于設(shè)計出功能完善、性能優(yōu)越的運動控制器。同芯運動控制器通常都能提供板上的多軸協(xié)調(diào)運動控制和復(fù)雜的運動軌跡規(guī)劃、實時地插補運算、誤差補償、伺服濾波算法,能夠?qū)崿F(xiàn)閉環(huán)控制。由于采用FPGA技術(shù)來進行硬件設(shè)計,方便運動控制器供應(yīng)商根據(jù)客戶的特殊工藝要求和技術(shù)要求進行個性化的定制,形成獨特的產(chǎn)品。plc系統(tǒng)控制價格




