湖南負壓清掃清車機解決方案
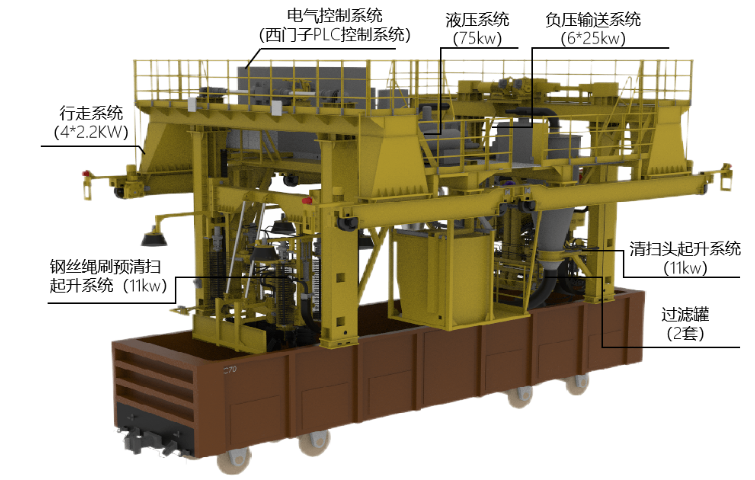
智能清車機器人由以下8大系統構成:包括鋼結構大車系統(形式:門式、半門式和橋式;驅動:設備沿鐵道方向行走,主要是鐵軌),清掃器系統(預清理:鋼絲繩刷;清掃器:柱刷+盤刷+罐體及其他組件),負壓系統(風機+除塵罐+儲存罐+負壓輸送管道),液壓系統(主要動力驅動形式為液壓),水氣路系統(水膜防堵技術;噴淋抑塵),電控系統(電源柜、控制柜、風機柜),輔助系統(傳感器、監控、大燈、步梯、護欄)余料回收系統(密封輸送皮帶+溜料槽、RGV軌道小車)。清車機 ,就選廣東匯博機器人技術有限公司,讓您滿意,期待您的光臨!湖南負壓清掃清車機解決方案
清車機
傳統的火車車廂余料清掃方式存在極高的安全風險。清掃人員每日需頻繁爬上火車車廂,在高處作業,不僅勞動強度極大,而且面臨著車廂隨時可能移動的風險,稍有不慎就可能發生墜落等嚴重安全事故。此外,每次清掃完畢后,還需對車廂進行重新綁扎與密封,若操作不當導致密封不嚴,就可能在下趟運輸中出現物料漏料,這不僅會造成物料損失,還可能對環境和運輸安全構成威脅。長期在這樣的環境中工作,清掃人員吸入大量粉塵,身體健康受到嚴重威脅,極易患上“塵肺病”等職業病。湖南負壓清掃清車機解決方案清車機 ,就選廣東匯博機器人技術有限公司,用戶的信賴之選,有需求可以來電咨詢!

在保障車廂清掃作業安全與高效的關鍵考量下,我們為智能清車機器人系統精心配置了軟件作業互鎖通訊模塊。翻車機在進行翻轉作業時,車廂位置和狀態會發生大幅變化,而清車機器人若此時同時動作,極有可能因空間原因導致嚴重的車廂碰撞事故。軟件作業互鎖通訊模塊則成為化解這一風險的關鍵防線。該模塊通過先進的通信技術,與翻車機控制系統建立起實時穩定的信息交互通道。當翻車機啟動作業時,其控制系統會向清車機器人發送信號,互鎖通訊模塊接收后,立即鎖定清車機器人的動作指令,使其保持靜止狀態;反之,當清車機器人準備作業時,同樣會檢測翻車機的工作狀態,只有在翻車機完全停止且處于安全狀態時,才允許清車機器人啟動,從而從根本上避免兩者同時動作造成的車廂碰撞,為整個作業流程筑牢安全屏障 。
設備可實現智能無人化操作,通過車廂位置自識別,能夠自主且準確地識別車廂位置。通過遠距離激光測距傳感器與近距離超聲傳感器的精密配合,它能夠實現對車廂輪廓的高精度識別,確保清掃過程中的精細走位。同時,設備采用了先進的自主平滑運動控制技術,并結合Adaptivecontrol算法,經由PLC精確控制變頻器,從而實現對清掃機加減速的精細調控。此外,借助變頻器內置的斜坡發生器,設備能夠確保加減速過程的平穩與流暢,進一步提升了作業的穩定性和效率。值得一提的是,該設備還配備了先進的多視覺系統,能夠自動拍攝車廂清掃結果,實現清掃效果的自我記錄、存儲與回傳,為用戶提供了更為直觀、便捷的清掃效果反饋。清車機 ,就選廣東匯博機器人技術有限公司,用戶的信賴之選,歡迎新老客戶來電!
車廂智能清掃機器人與翻車機還建立了安全互鎖機制,為作業現場的安全提供了雙重保障。在翻車機工作時,機器人會自動停止運行,避免與翻車機同時作業,杜絕了交叉作業帶來的風險。當翻車機完成卸車動作,并且確認安全后,機器人才能啟動清掃工作。這種安全互鎖機制,確保了翻車機在進行卸車操作時,機器人不會誤入作業區域,就像是給翻車機和機器人之間設置了一道“安全閘”,確保了整個作業過程的安全性,讓工作人員可以放心地進行生產操作。清車機 ,就選廣東匯博機器人技術有限公司,用戶的信賴之選,有需要可以聯系我司哦!湖南負壓清掃清車機解決方案
廣東匯博機器人技術有限公司致力于提供清車機 ,歡迎您的來電!湖南負壓清掃清車機解決方案
2019年9月,匯博機器人通過和濟寧礦業集團物流有限公司開展車廂智能清掃機器人系統項目合作研發,于2020年3月份在2號線安裝調試完畢,車廂智能清掃機器人系統于4月20號正式投入使用;2020年8月濟礦物流公司再次訂購一臺智能清車機器人,并于2020年10月中旬聯機調試完成(兩臺車廂智能清掃機器人系統只需一名操作工操作),10月30號正式投入使用;濟寧礦業集團物流有限公司在2021年7月再次訂購兩臺,安裝在1號線。并于2022年1月中旬聯機調試完成。湖南負壓清掃清車機解決方案
- 海南核建組對自動化核建智能工廠改造廠家 2025-06-24
- 天津核建埋件生產自動化核建智能工廠改造哪家好 2025-06-24
- 寧夏半導體工藝流程自動化半導體智能工廠改造多少錢 2025-06-24
- 青海分布式屋頂光伏智能清潔機器人供應商 2025-06-24
- 江蘇濕粘煤清掃清車機多少錢 2025-06-23
- 內蒙古山地光伏智能清潔機器人價格 2025-06-23
- 西藏敞車清掃清車機費用 2025-06-23
- 福建半導體自動化待測庫半導體智能工廠改造服務 2025-06-23
- 山西低成本高頻次除塵光伏智能清潔機器人供應商 2025-06-23
- 海南陶瓷陳腐處理自動化陶瓷智能工廠改造廠家 2025-06-23
- 南京實用日用品模具生產廠家 2025-06-24
- 安徽國產攪拌器故障維修 2025-06-24
- 河北YFA-F型液壓閥門測試臺哪家好 2025-06-24
- 江浙滬自動平面磨床定制廠家 2025-06-24
- 南昌人臉識別二維碼刷卡機技術參數 2025-06-24
- 戶外滾珠絲桿平臺 2025-06-24
- 云南加工柔性加工系統輔助設備系列 2025-06-24
- 武漢工位冷氣機保養 2025-06-24
- 鹽城精密定轉子模具備件大概費用 2025-06-24
- 深圳電動機熱保護器 2025-06-24