-
基因檢測用口腔拭子生產(chǎn)廠家排名推薦及選擇建議深圳美迪科生物
-
肝素/肝素鈉/肝素鋰抗凝劑真空**管源頭生產(chǎn)定制廠家美迪科
-
美迪帝CR80清潔卡:守護卡片設備高效運行的“隱形衛(wèi)士”!
-
IPA-M3酒精清潔擦拭布,多領域的便捷高效清潔工具!
-
CCD相機傳感器清潔棒:守護影像純凈的精密清潔工具!
-
IPA清潔棉簽與IPA清潔筆:熱敏等打印機頭清潔的理想之選!
-
無塵凈化棉簽擦拭棒:精密制造與潔凈領域的“微小守護者”!
-
Zebra斑馬證卡打印機的保養(yǎng)與維護:清潔套裝推薦指南!
-
深圳美迪帝TOC清潔驗證棉簽:保障生產(chǎn)安全與產(chǎn)品質(zhì)量的利器!
-
熱敏打印機頭清潔利器:深圳美迪帝IPACP-03酒精清潔筆!
金華搬運機械手定制
一、搬運機械手簡介:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導電系統(tǒng)及控制系統(tǒng)等組成。二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續(xù)工作時間長;3.定位精度可達0.02mm;4. 重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三坐標搬運機械手,PLC控制。南京高銳特起重機械有限公司生產(chǎn)。金華搬運機械手定制
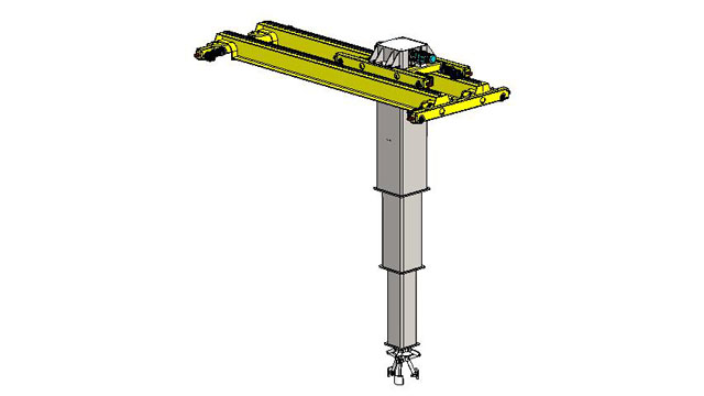
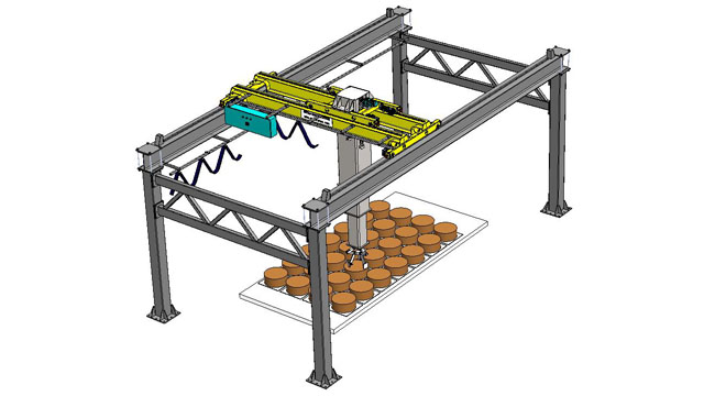
一、搬運機械手簡介:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導電系統(tǒng)及控制系統(tǒng)等組成。 二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續(xù)工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。 三、搬運機械手產(chǎn)品構(gòu)成: 三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運行機構(gòu),采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構(gòu),采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構(gòu),采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現(xiàn)機械手的開閉,爪指采用內(nèi)爪式,傳感器檢測元件+機械限位;控制系統(tǒng),通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行。嘉興定制搬運機械手搬運機械手,哪家生產(chǎn),南京高銳特有限公司。
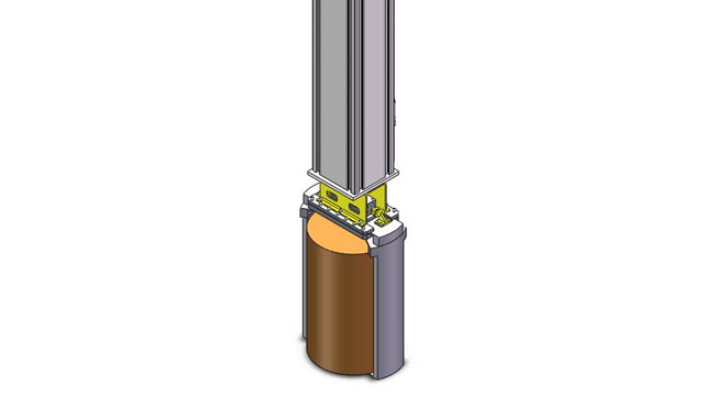
一、搬運機械手簡介:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導電系統(tǒng)及控制系統(tǒng)等組成。 二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續(xù)工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置; 6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三、搬運機械手產(chǎn)品構(gòu)成:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運行機構(gòu),采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構(gòu),采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構(gòu),采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現(xiàn)機械手的開閉,爪指采用內(nèi)爪式,傳感器檢測元件+機械限位;控制系統(tǒng),通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行。
一、搬運機械手簡介:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導電系統(tǒng)及控制系統(tǒng)等組成。 二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續(xù)工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三坐標搬運機械手生產(chǎn)廠家。
一、搬運機械手簡介:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導電系統(tǒng)及控制系統(tǒng)等組成。 二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續(xù)工作時間長; 3.定位精度可達0.02mm; 4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三、搬運機械手產(chǎn)品構(gòu)成:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運行機構(gòu),采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構(gòu),采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構(gòu),采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現(xiàn)機械手的開閉,爪指采用內(nèi)爪式,傳感器檢測元件+機械限位;控制系統(tǒng),通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行。三坐標搬運機械手,PLC控制。宿州搬運機械手價格
三坐標搬運機械手,PLC控制。南京高銳特起重機生產(chǎn)。金華搬運機械手定制
一、搬運機械手簡介:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導電系統(tǒng)及控制系統(tǒng)等組成。 二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續(xù)工作時間長;3.定位精度可達0.02mm; 4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運; 5.各機構(gòu)均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三、搬運機械手產(chǎn)品構(gòu)成:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運行機構(gòu),采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構(gòu),采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構(gòu),采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現(xiàn)機械手的開閉,爪指采用內(nèi)爪式,傳感器檢測元件+機械限位;控制系統(tǒng),通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行。金華搬運機械手定制
- 吉林手動空中穿梭車 2025-05-15
- 定制空中穿梭車 2025-05-15
- 阜新蝸輪蝸桿卷揚機報價 2025-05-15
- 常州空中穿梭車哪家好 2025-05-15
- 白山銷售空中穿梭車 2025-05-15
- 合肥蝸輪蝸桿卷揚機 2025-05-15
- 承德電動空中穿梭車 2025-05-15
- 定制空中穿梭車價格 2025-05-15
- 南京蝸輪蝸桿卷揚機怎么選 2025-05-15
- 淮安空中穿梭車報價 2025-05-15
- 山西真空(負壓)排水系統(tǒng)應用場景 2025-05-16
- 蘇州油密封旋塞閥DN50 2025-05-16
- 河南附近哪里有齒輪泵 2025-05-16
- 閔行區(qū)大規(guī)模智能客服 2025-05-16
- 河南升降桿閘閥報價 2025-05-16
- 河南降溫工業(yè)大吊扇公司電話 2025-05-16
- 浙江塑膠自動噴涂線報價 2025-05-16
- 浙江在線點膠機品牌 2025-05-16
- 浙江點膠機選型 2025-05-16
- 韶關搬運庫卡機器人外部軸 2025-05-16