廣州晶圓運(yùn)送機(jī)械吸臂怎么聯(lián)系
本發(fā)明涉及一種半導(dǎo)體制造技術(shù),尤其是一種用于晶圓搬運(yùn)的機(jī)械手。
背景技術(shù):
在半導(dǎo)體加工設(shè)備中,經(jīng)常需要將晶圓在各個工位之間進(jìn)行傳送,在傳送的過程中,傳送精度越高,設(shè)備工藝一致性就越好,速度越快,單臺設(shè)備的產(chǎn)能就越大。隨著半導(dǎo)體工藝的發(fā)展,設(shè)備處理的工藝越來越復(fù)雜,對設(shè)備自動化程度、柔性化程度要求也越來越高,這就需要一種定位精度高,速度快的多自由度的機(jī)械手。
技術(shù)實現(xiàn)要素:
本發(fā)明針對現(xiàn)有技術(shù)中的不足,提供了一種晶圓搬運(yùn)機(jī)械手,本發(fā)明的機(jī)械手在傳送過程中晶片中心始終保證直線運(yùn)動,且角度不會發(fā)生改變。從而提高機(jī)械手整體剛度和承重能力,同時提高了重復(fù)定位精度。本發(fā)明結(jié)構(gòu)合理性能穩(wěn)定,維護(hù)方便,多功能集一身,可滿足多種工藝設(shè)備要求,適用于各種半導(dǎo)體設(shè)備。
各支承、連接件的剛性也要有一定的要求,以保證能承受所需要的驅(qū)動力。廣州晶圓運(yùn)送機(jī)械吸臂怎么聯(lián)系
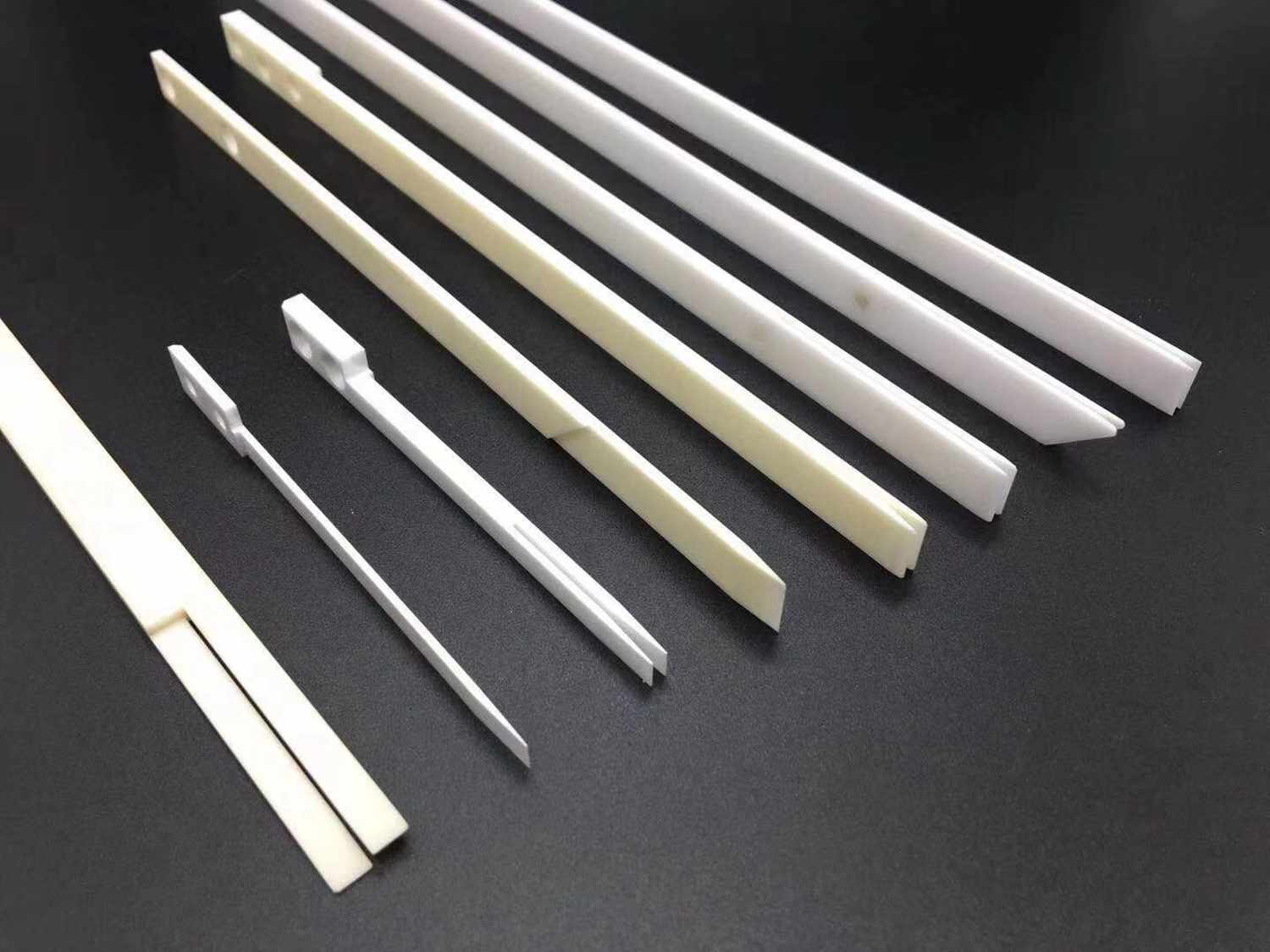
晶圓運(yùn)送機(jī)械吸臂的高速度和高精度,能夠滿足封裝和測試過程中對運(yùn)輸速度和精度的要求。光刻和薄膜沉積:在光刻和薄膜沉積過程中,晶圓運(yùn)送機(jī)械吸臂被用于將晶圓從一個工序轉(zhuǎn)移到另一個工序。它能夠?qū)⒕A準(zhǔn)確地吸附在機(jī)械臂上,并將其運(yùn)送到光刻機(jī)或薄膜沉積設(shè)備上,以完成后續(xù)的光刻和薄膜沉積工作。晶圓運(yùn)送機(jī)械吸臂的高精度和穩(wěn)定性能,能夠確保光刻和薄膜沉積過程中的精確定位和穩(wěn)定運(yùn)輸。
晶圓運(yùn)送機(jī)械吸臂在半導(dǎo)體行業(yè)中扮演著重要的角色。它的應(yīng)用范圍廣,能夠滿足不同工序的晶圓運(yùn)輸需求。晶圓運(yùn)送機(jī)械吸臂的高精度、高速度和穩(wěn)定性能,能夠提高生產(chǎn)效率,保證產(chǎn)品質(zhì)量和生產(chǎn)安全。隨著半導(dǎo)體行業(yè)的不斷發(fā)展,晶圓運(yùn)送機(jī)械吸臂的應(yīng)用前景將更加廣闊。 東莞新款晶圓運(yùn)送機(jī)械吸臂代理廠家工業(yè)機(jī)械臂距離高精度的智能制造還有很長一段路要走。

隨著機(jī)器人技術(shù)的發(fā)展,應(yīng)用高速度、高精度、高負(fù)載自重比的機(jī)器人結(jié)構(gòu)受到工業(yè)和航空航天領(lǐng)域的關(guān)注。由于運(yùn)動過程中關(guān)節(jié)和連桿的柔性效應(yīng)的增加,使結(jié)構(gòu)發(fā)生變形從而使任務(wù)執(zhí)行的精度降低。所以,機(jī)器人機(jī)械臂結(jié)構(gòu)柔性特征必須予以考慮,實現(xiàn)柔性機(jī)械臂高精度有效控制也必須考慮系統(tǒng)動力學(xué)特性。柔性機(jī)械臂是一個非常復(fù)雜的動力學(xué)系統(tǒng),其動力學(xué)方程具有非線性、強(qiáng)耦合、實變等特點(diǎn)。而進(jìn)行柔性臂動力學(xué)問題的研究,其模型的建立是極其重要的。柔性機(jī)械臂不僅是一個剛?cè)狁詈系姆蔷€性系統(tǒng),而且也是系統(tǒng)動力學(xué)特性與控制特性相互耦合即機(jī)電耦合的非線性系統(tǒng)。動力學(xué)建模的目的是為控制系統(tǒng)描述及控制器設(shè)計提供依據(jù)。一般控制系統(tǒng)的描述(包括時域的狀態(tài)空間描述和頻域的傳遞函數(shù)描述)與傳感器/執(zhí)行器的定位,從執(zhí)行器到傳感器的信息傳遞以及機(jī)械臂的動力學(xué)特性密切相關(guān)。
區(qū)熔法分為兩種:水平區(qū)熔法和立式懸浮區(qū)熔法。前者主要用于鍺、GaAs等材料的提純和單晶生長;后者主要用于硅。為什么有橫著和豎著長的不同捏?這是由于硅的熔點(diǎn)高,化學(xué)性能活潑,容易受到異物的玷污,所以難以找到適合的器皿來盛方,自然水平區(qū)熔法不能用在硅的生長上啦。區(qū)熔法與直拉法比較大的不同之處在于:區(qū)熔法一般不使用坩鍋,引入的雜質(zhì)更少,生長的材料雜質(zhì)含量也就更少。總而言之,單晶硅棒是圓柱形的,使用這種方法得到的單晶硅圓片自然也是圓形的了。就是下圖這個樣的——知道是兩頭的尖尖是如何造成的嗎?Bingo,圖左的尖尖是籽晶,圖右的尖尖是晶棒長到***,從熔融態(tài)里出來后,由于復(fù)雜的流體力學(xué)原理,以及熔融態(tài)的硅迅速凝固而導(dǎo)致的。 簡單的搬運(yùn)與碼垛,根本無法稱之為智能制造。
技術(shù)實現(xiàn)要素:
本實用新型要解決的技術(shù)問題是:現(xiàn)有機(jī)械手臂易出現(xiàn)碰撞損傷,且傳送晶圓效率較低。
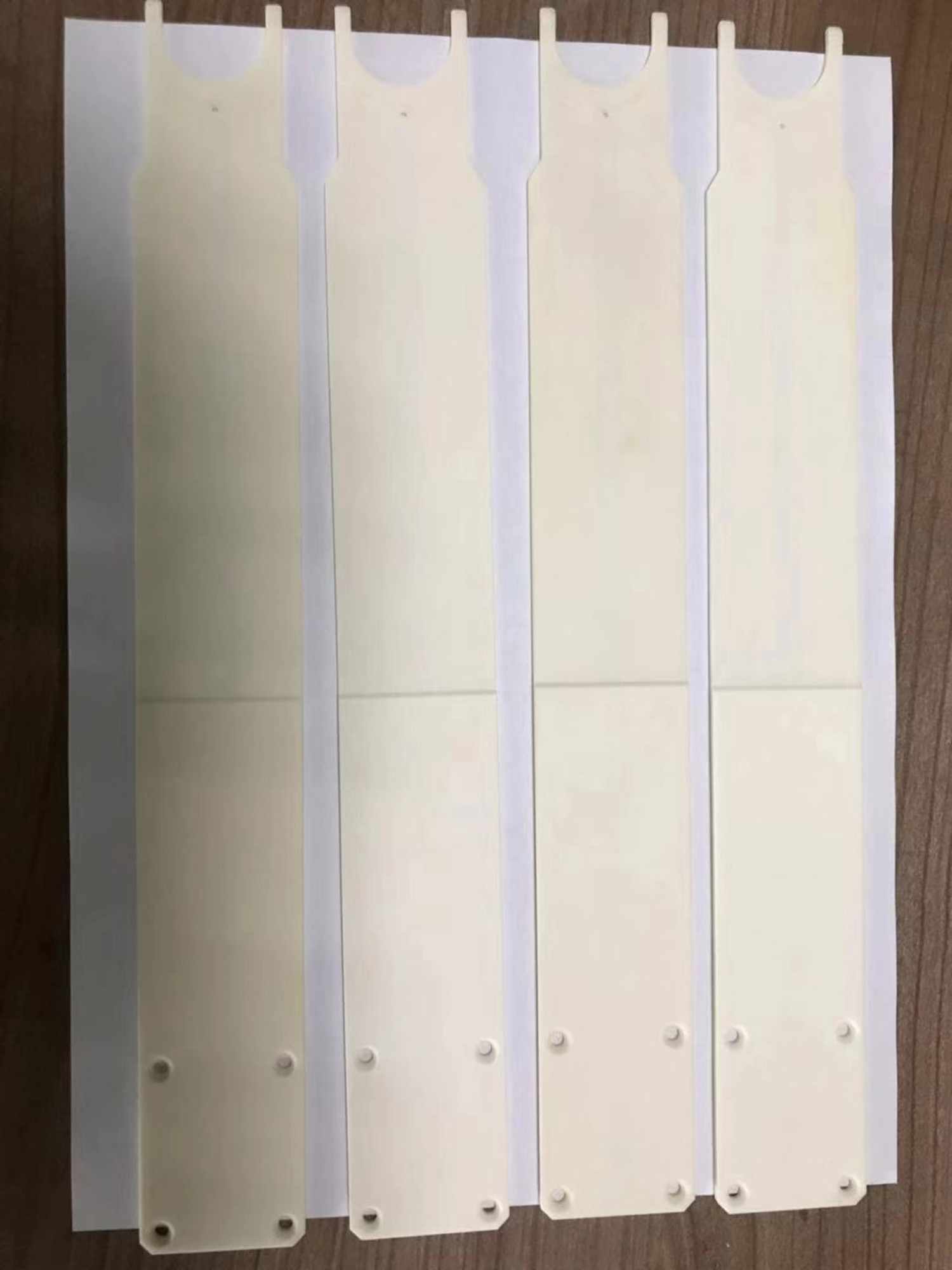
為了解決上述問題,本實用新型的一個實施例提供了一種機(jī)械手臂,其包括:托板;固定在所述托板上的絨毛墊,所述絨毛墊至少部分裸露于所述托板的用于承載晶圓的表面,并適于在與所述表面之上的晶圓接觸時利用范德華力吸附晶圓。
可選地,所述絨毛墊包括托墊和絨毛,所述托墊固定在所述托板上,所述絨毛固定在所述托墊上。
可選地,所述托板設(shè)有貫穿所述表面的螺紋通孔,所述托墊嵌設(shè)在所述螺紋通孔內(nèi),并通過與所述螺紋通孔螺紋配合的螺釘固定在所述托板上。
可選地,所述絨毛為硅樹脂橡膠絨毛或聚酯樹膠絨毛。
可選地,所述機(jī)械手臂上所有絨毛的黏合力之和為6N以上。
可選地,所述絨毛墊上的絨毛排列成環(huán)形。
可選地,所述絨毛墊的數(shù)量為三個以上,各個所述絨毛墊之間間隔排布。 根據(jù)機(jī)械手運(yùn)動和工作的要求,如管路、冷卻裝置、行程定位裝置和自動檢測裝置等.珠海新款晶圓運(yùn)送機(jī)械吸臂價位
柔性機(jī)械臂是一個非常復(fù)雜的動力學(xué)系統(tǒng),其動力學(xué)方程具有非線性、強(qiáng)耦合、實變等特點(diǎn)。廣州晶圓運(yùn)送機(jī)械吸臂怎么聯(lián)系
9)模糊與神經(jīng)網(wǎng)絡(luò)控制。是一種語言控制器,可反映人在進(jìn)行控制活動時的思維特點(diǎn)。其主要特點(diǎn)之一是控制系統(tǒng)設(shè)計并不需要通常意義上的被控對象的數(shù)學(xué)模型,而是需要操作者或?qū)<业慕?jīng)驗知識,操作數(shù)據(jù)等。[3]研究意義與剛性機(jī)械臂相比較,柔性機(jī)械臂具有結(jié)構(gòu)輕、載重/自重比高等特性,因而具有較低的能耗、較大的操作空間和很高的效率,其響應(yīng)快速而準(zhǔn)確,有著很多潛在的優(yōu)點(diǎn),在工業(yè)、國防等應(yīng)用領(lǐng)域中占有十分重要的地位.隨著宇航業(yè)及機(jī)器人業(yè)的飛速發(fā)展,越來越多地采用由若干個柔性構(gòu)件組成的多柔體系統(tǒng).。傳統(tǒng)的多剛體動力學(xué)的分析方法及控制方法己不能滿足多柔體系統(tǒng)的動力分析及控制的要求.柔性機(jī)械臂作為最簡單的非平凡多柔體系統(tǒng),被***地用作多柔體系統(tǒng)的研究模型。 廣州晶圓運(yùn)送機(jī)械吸臂怎么聯(lián)系
深圳市德澳美精密制造有限公司堅持“以人為本”的企業(yè)理念,擁有一支專業(yè)的員工隊伍,力求提供更好的產(chǎn)品和服務(wù)回饋社會,并歡迎廣大新老客戶光臨惠顧,真誠合作、共創(chuàng)美好未來。德澳美——您可信賴的朋友,公司地址:深圳市龍華區(qū)龍華街道清湖社區(qū)清湖安之龍工業(yè)園B棟201。
- 本地精密結(jié)構(gòu)陶瓷市場價 2025-07-17
- 全國官方精密結(jié)構(gòu)陶瓷賣價 2025-07-17
- 深圳進(jìn)口晶圓運(yùn)送機(jī)械吸臂怎么聯(lián)系 2025-07-17
- 韶關(guān)原裝微孔陶瓷真空吸盤生產(chǎn)廠家怎么選擇 2025-07-17
- 佛山精密結(jié)構(gòu)陶瓷市場報價 2025-07-17
- 廣東本地精密結(jié)構(gòu)陶瓷價格多少 2025-07-17
- 全國原裝微孔陶瓷真空吸盤代理 2025-07-17
- 廣州原裝微孔陶瓷真空吸盤工廠 2025-07-17
- 惠州高溫結(jié)構(gòu)陶瓷分類 2025-07-17
- 廣東本地精密結(jié)構(gòu)陶瓷什么價格 2025-07-17
- 泰州閉式冷卻塔多少錢 2025-07-17
- 虹口區(qū)本地不銹鋼反應(yīng)釜 2025-07-17
- 陜西進(jìn)口滅菌器 2025-07-17
- 溫州中走絲線切割推薦廠家 2025-07-17
- 寧夏廚房用水提升泵產(chǎn)品介紹 2025-07-17
- 山東彎頭性能 2025-07-17
- 佛山變電站供電站用防爆空調(diào) 2025-07-17
- 上海特氟龍噴涂加工 2025-07-17
- 蘇州工程機(jī)械液壓系統(tǒng)保養(yǎng) 2025-07-17
- 河源六軸發(fā)那科機(jī)器人減速機(jī) 2025-07-17