江西車載通信基于模型設(shè)計(jì)好用的軟件
汽車控制器軟件基于模型設(shè)計(jì)國產(chǎn)平臺需支持發(fā)動機(jī)ECU、整車VCU等控制器的全流程開發(fā),具備圖形化建模與代碼生成功能。平臺應(yīng)提供符合汽車行業(yè)標(biāo)準(zhǔn)的控制算法模塊,方便工程師搭建空燃比控制、扭矩分配等邏輯,涵蓋從傳感器信號處理到執(zhí)行器驅(qū)動的完整鏈路。同時支持模型在環(huán)、軟件在環(huán)等多級測試,可模擬不同工況下的控制器響應(yīng),驗(yàn)證控制策略的有效性與魯棒性。平臺還需具備良好的兼容性,能與硬件在環(huán)測試設(shè)備對接,實(shí)現(xiàn)控制器軟件的閉環(huán)驗(yàn)證,滿足汽車控制器開發(fā)的嚴(yán)苛要求,適配三電系統(tǒng)、底盤控制等多樣化的開發(fā)場景。甘茨軟件科技(上海)有限公司與比亞迪、上海大眾、中國一汽等企業(yè)有合作,在永磁同步電機(jī)控制仿真等方面有成功案例,其開發(fā)的國產(chǎn)平臺可應(yīng)用于汽車控制器軟件基于模型設(shè)計(jì)中。工業(yè)控制系統(tǒng)建模MBD,以模型串聯(lián)控制邏輯設(shè)計(jì)與仿真,可提前發(fā)現(xiàn)問題,讓系統(tǒng)運(yùn)行更穩(wěn)定。江西車載通信基于模型設(shè)計(jì)好用的軟件

飛行器控制系統(tǒng)設(shè)計(jì)MBD國產(chǎn)平臺在姿態(tài)控制、飛控算法驗(yàn)證等方面展現(xiàn)出自主可控的技術(shù)優(yōu)勢。平臺需支持飛行器模型搭建,能精確計(jì)算氣動參數(shù)、質(zhì)量特性對姿態(tài)的影響,模擬俯仰、橫滾、偏航等運(yùn)動的動態(tài)響應(yīng)。針對無人機(jī)與低空經(jīng)濟(jì)應(yīng)用,平臺應(yīng)提供模塊化的飛控算法模塊(如PID控制、模型預(yù)測控制),支持自主導(dǎo)航、避障等功能的可視化建模,驗(yàn)證控制邏輯在復(fù)雜空域環(huán)境中的有效性。國產(chǎn)平臺的優(yōu)勢在于適配國內(nèi)飛行器研發(fā)的技術(shù)標(biāo)準(zhǔn)與應(yīng)用場景,提供符合適航要求的模型驗(yàn)證工具,支持需求追溯與測試覆蓋率分析。同時,具備良好的二次開發(fā)接口,允許用戶集成自主研發(fā)的控制算法,保護(hù)重點(diǎn)技術(shù),且本地化技術(shù)支持團(tuán)隊(duì)能快速響應(yīng)定制化需求,為飛行器控制系統(tǒng)的自主研發(fā)提供可靠支撐。銀川應(yīng)用層軟件開發(fā)系統(tǒng)建模服務(wù)價格車載通信基于模型設(shè)計(jì)高性價比軟件,能模擬多樣環(huán)境,兼顧效率與精度,降低成本。
汽車領(lǐng)域基于模型設(shè)計(jì)(MBD)的優(yōu)勢體現(xiàn)在需求可視化、早期驗(yàn)證與團(tuán)隊(duì)協(xié)作效率提升三個方面。需求可視化層面,MBD能將“急加速時換擋平順性”等抽象功能需求轉(zhuǎn)化為可執(zhí)行圖形化模型,通過狀態(tài)機(jī)、數(shù)據(jù)流圖等元素直觀呈現(xiàn)控制邏輯,降低需求歧義性,便于開發(fā)團(tuán)隊(duì)與需求方達(dá)成共識。早期驗(yàn)證方面,MBD支持開發(fā)全過程的仿真驗(yàn)證,從模型在環(huán)到硬件在環(huán),各階段可發(fā)現(xiàn)邏輯錯誤、硬件接口不匹配等不同層面問題,避免缺陷流入量產(chǎn)階段,據(jù)統(tǒng)計(jì)采用MBD可使汽車電子控制器現(xiàn)場故障率降低半數(shù)以上。團(tuán)隊(duì)協(xié)作上,MBD采用標(biāo)準(zhǔn)化模型格式與開發(fā)流程,電子、機(jī)械、軟件等專業(yè)工程師可基于同一模型開展工作,如自動駕駛系統(tǒng)開發(fā)中,感知算法團(tuán)隊(duì)與執(zhí)行器控制團(tuán)隊(duì)通過模型接口共享數(shù)據(jù),減少跨專業(yè)溝通成本;模型版本管理機(jī)制便于追蹤修改記錄,提升團(tuán)隊(duì)協(xié)作效率。
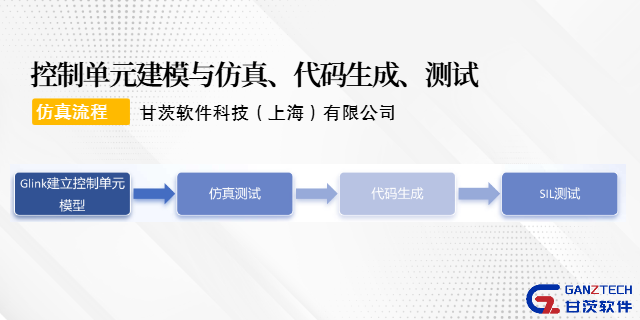
汽車控制器軟件基于模型設(shè)計(jì)(MBD)是將控制邏輯以圖形化模型形式表達(dá)的開發(fā)方法,貫穿從需求分析到代碼生成的全流程。在發(fā)動機(jī)控制器ECU開發(fā)中,工程師可通過搭建燃油噴射、點(diǎn)火控制的可視化模型,直觀呈現(xiàn)不同轉(zhuǎn)速下的控制策略,避免傳統(tǒng)手寫代碼的邏輯漏洞。整車控制器VCU開發(fā)中,MBD能整合動力系統(tǒng)參數(shù),構(gòu)建能量分配策略模型,模擬不同駕駛模式下的扭矩輸出與能量回收效果,通過模型仿真提前驗(yàn)證控制邏輯的合理性。對于域控制器等復(fù)雜系統(tǒng),MBD支持模塊化建模,各功能模塊可單獨(dú)開發(fā)與測試,再通過模型集成驗(yàn)證模塊間的交互邏輯,減少系統(tǒng)級缺陷。這種方法還支持早期虛擬測試,在物理樣機(jī)制作前通過模型在環(huán)(MIL)仿真發(fā)現(xiàn)設(shè)計(jì)問題,大幅縮短開發(fā)周期,同時為后續(xù)的軟件在環(huán)(SIL)、硬件在環(huán)(HIL)測試奠定基礎(chǔ),確保控制器軟件的可靠性。電子與通訊領(lǐng)域MBD優(yōu)勢明顯,可統(tǒng)一設(shè)計(jì)與驗(yàn)證,減少斷層,提升開發(fā)質(zhì)量。
仿真驗(yàn)證MBD好用的軟件需具備多領(lǐng)域模型的集成能力,能對汽車、工業(yè)自動化等領(lǐng)域的復(fù)雜系統(tǒng)進(jìn)行多面驗(yàn)證。軟件應(yīng)支持故障注入、邊界條件測試等功能,模擬極端工況下的系統(tǒng)響應(yīng),如汽車制動系統(tǒng)在不同路面附著系數(shù)下的表現(xiàn)、工業(yè)機(jī)器人在關(guān)節(jié)故障時的應(yīng)急響應(yīng),通過量化分析評估系統(tǒng)的可靠性與安全性。同時,軟件需提供豐富的數(shù)據(jù)分析工具,支持仿真結(jié)果與設(shè)計(jì)指標(biāo)的自動比對,生成包含誤差分析、優(yōu)化建議的詳細(xì)驗(yàn)證報(bào)告,為系統(tǒng)迭代優(yōu)化提供準(zhǔn)確依據(jù),且能記錄驗(yàn)證過程數(shù)據(jù),滿足追溯性要求。甘茨軟件科技(上海)有限公司在系統(tǒng)模擬仿真等方面有成功案例,其開發(fā)的仿真驗(yàn)證MBD軟件可滿足相關(guān)領(lǐng)域的驗(yàn)證需求,為客戶提供有效的工具支持。汽車領(lǐng)域基于模型設(shè)計(jì)優(yōu)勢多,全流程有模型支撐,還能自動生成代碼,效率高且出錯少。杭州仿真驗(yàn)證系統(tǒng)建模適合中小企業(yè)嗎
軌道交通領(lǐng)域智能交通系統(tǒng)MBD,能整合交通流與信號控制模型,助力優(yōu)化運(yùn)行效率。江西車載通信基于模型設(shè)計(jì)好用的軟件
工業(yè)控制系統(tǒng)建模MBD以圖形化方式構(gòu)建PLC、DCS等控制系統(tǒng)的邏輯模型與動態(tài)響應(yīng)模型,覆蓋從傳感器信號采集到執(zhí)行器動作輸出的完整控制鏈路。在離散制造業(yè)生產(chǎn)線建模中,通過狀態(tài)流程圖描述設(shè)備的啟停邏輯、物料傳輸?shù)臅r序關(guān)系,構(gòu)建傳感器觸發(fā)信號與執(zhí)行器動作的聯(lián)動模型,仿真不同生產(chǎn)節(jié)拍下的系統(tǒng)運(yùn)行狀態(tài),驗(yàn)證控制邏輯在正常與異常工況下的響應(yīng)特性。針對流程工業(yè)的過程控制(如化工反應(yīng)釜溫度控制),需搭建PID控制回路的動態(tài)模型,整合溫度傳感器的測量特性與調(diào)節(jié)閥的動作特性,計(jì)算不同比例系數(shù)、積分時間、微分時間組合下的溫度控制曲線,優(yōu)化控制參數(shù)以減小超調(diào)量、縮短調(diào)節(jié)時間。建模過程中引入工業(yè)現(xiàn)場的典型干擾因素(如電網(wǎng)電壓波動、設(shè)備響應(yīng)延遲),通過仿真評估控制系統(tǒng)的抗干擾能力,確保模型能真實(shí)反映工業(yè)控制系統(tǒng)的動態(tài)特性,為控制系統(tǒng)的設(shè)計(jì)優(yōu)化與升級改造提供可靠依據(jù)。江西車載通信基于模型設(shè)計(jì)好用的軟件
- 烏魯木齊整車制動性能汽車仿真項(xiàng)目報(bào)價 2025-07-29
- 湖北工程領(lǐng)域科學(xué)分析外包公司 2025-07-29
- 深圳自動化生產(chǎn)邏輯算法有哪些品牌 2025-07-29
- 天津自動化生產(chǎn)邏輯算法國產(chǎn)平臺 2025-07-29
- 廣東高精度科學(xué)計(jì)算軟件價格 2025-07-29
- 陜西神經(jīng)網(wǎng)絡(luò)控制算法哪個軟件好 2025-07-29
- 杭州仿真驗(yàn)證MBD的開發(fā)優(yōu)勢 2025-07-29
- 銀川動力系統(tǒng)仿真驗(yàn)證什么品牌服務(wù)好 2025-07-29
- 河北神經(jīng)網(wǎng)絡(luò)智能控制算法哪個軟件好 2025-07-29
- 江西圖形化建模MBD哪個軟件性價比高 2025-07-29
- 高淳區(qū)常規(guī)訂單管理系統(tǒng)開發(fā) 2025-07-29
- 長沙學(xué)校智能化弱電系統(tǒng)集成解決方案 2025-07-29
- 綜合CRM會員處理方法 2025-07-29
- 宿遷什么智慧社區(qū)一般多少錢 2025-07-29
- 中國澳門物業(yè)管理系統(tǒng)廠家價格 2025-07-29
- aps高級排產(chǎn)系統(tǒng)定制費(fèi)用 2025-07-29
- 槐蔭區(qū)快手短視頻運(yùn)營價格 2025-07-29
- 徐匯區(qū)定制Matlab服務(wù)電話 2025-07-29
- 江蘇芯片封裝企業(yè) 2025-07-29
- 靜安區(qū)訂單管理系統(tǒng)開發(fā)歡迎選購 2025-07-29