江蘇電機(jī)控制汽車仿真與實車測試誤差大嗎
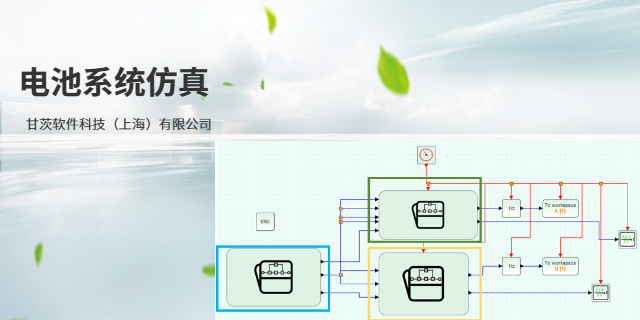
電池系統(tǒng)汽車模擬仿真控制工具用于構(gòu)建電池單體與電池包的電化學(xué)模型,實現(xiàn)對電池狀態(tài)與控制策略的虛擬測試。工具需支持電芯等效電路建模,模擬不同充放電倍率、溫度下的電壓曲線與容量衰減規(guī)律,計算SOC、SOH的動態(tài)變化。控制策略仿真模塊需能驗證均衡控制、熱管理策略的有效性,分析均衡電流對電池一致性的改善效果,以及冷卻系統(tǒng)對溫度分布的調(diào)節(jié)作用。工具還應(yīng)具備故障仿真功能,模擬電芯短路、溫度失控等異常狀態(tài),評估BMS的安全保護(hù)機(jī)制。甘茨軟件科技(上海)有限公司與其他企業(yè)有合作,在相關(guān)仿真領(lǐng)域的技術(shù)能力可支撐電池系統(tǒng)汽車模擬仿真控制工具的應(yīng)用。電池系統(tǒng)模擬仿真技術(shù)原理是通過電化學(xué)模型,復(fù)現(xiàn)充放電特性與熱管理狀態(tài)。江蘇電機(jī)控制汽車仿真與實車測試誤差大嗎
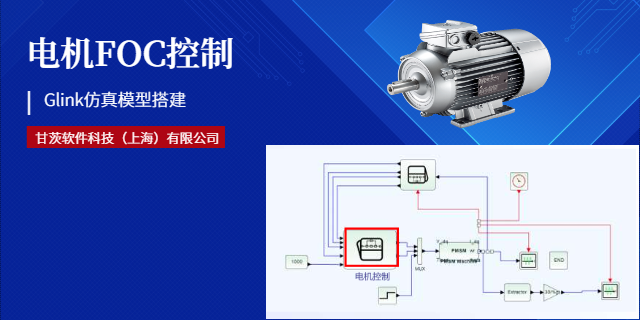
汽車電驅(qū)動系統(tǒng)建模仿真涵蓋電機(jī)本體、控制器與傳動機(jī)構(gòu)的協(xié)同分析,是優(yōu)化電驅(qū)動效率的重要手段。電機(jī)建模需精確描述永磁同步電機(jī)的電磁特性,包含磁鏈、電感的非線性變化,通過有限元分析計算不同工況下的銅損、鐵損;控制器模型則需搭建FOC控制算法框架,模擬電流環(huán)、速度環(huán)的PI調(diào)節(jié)器動態(tài)響應(yīng),優(yōu)化弱磁控制策略。傳動系統(tǒng)建模需考慮齒輪嚙合間隙、減速器效率,分析動力傳遞過程中的能量損耗。通過聯(lián)合仿真可獲得電驅(qū)動系統(tǒng)的效率Map圖,為整車能量管理策略開發(fā)提供關(guān)鍵數(shù)據(jù),助力新能源汽車?yán)m(xù)航能力提升。江蘇電機(jī)控制汽車仿真與實車測試誤差大嗎電機(jī)控制模擬仿真實施方案需明確建模標(biāo)準(zhǔn)與測試工況,保障仿真過程規(guī)范有序。

底盤控制汽車仿真服務(wù)涵蓋制動、轉(zhuǎn)向、懸架系統(tǒng)的控制策略驗證與參數(shù)優(yōu)化。服務(wù)包括ABS/ESP系統(tǒng)仿真,搭建制動管路與輪胎路面模型,測試不同路面(干燥、濕滑、冰雪)下的制動距離與車身穩(wěn)定性,優(yōu)化控制參數(shù);轉(zhuǎn)向系統(tǒng)仿真,分析EPS助力特性、傳動比對操縱性的影響,改善轉(zhuǎn)向手感與回正性能。懸架系統(tǒng)仿真通過多體動力學(xué)模型,評估半主動懸架在不同路況下的阻尼調(diào)節(jié)效果,提升乘坐舒適度。服務(wù)還能開展多系統(tǒng)聯(lián)合仿真,分析底盤控制策略對整車操縱穩(wěn)定性的綜合影響,輸出針對性的優(yōu)化建議。
汽車仿真驗證服務(wù)涵蓋從部件到整車的多層級驗證,提供多方位的技術(shù)支持。服務(wù)內(nèi)容包括部件級仿真,如發(fā)動機(jī)部件的熱力學(xué)分析、電機(jī)的電磁特性驗證;系統(tǒng)級仿真,如動力系統(tǒng)的匹配驗證、底盤系統(tǒng)的操縱性測試;整車級仿真,如整車性能的綜合評估、極端工況的適應(yīng)性驗證。服務(wù)過程中,會根據(jù)客戶需求搭建相應(yīng)的仿真模型,開展多工況仿真測試,記錄關(guān)鍵數(shù)據(jù)(如性能指標(biāo)、參數(shù)敏感性),并進(jìn)行深入分析,輸出包含仿真結(jié)果、問題診斷、優(yōu)化建議的報告。同時提供模型校準(zhǔn)服務(wù),結(jié)合實車測試數(shù)據(jù)調(diào)整模型參數(shù),確保仿真結(jié)果的準(zhǔn)確性,幫助客戶在開發(fā)的不同階段評估產(chǎn)品性能,降低實車測試成本。新能源汽車模擬仿真服務(wù)含性能仿真、問題診斷,為研發(fā)提供數(shù)據(jù)支持與改進(jìn)建議。
自動駕駛汽車仿真測試軟件需構(gòu)建覆蓋感知、決策、控制全鏈路的虛擬測試環(huán)境。軟件應(yīng)能生成多樣化場景庫,包含不同路況、天氣與交通參與者,支持激光雷達(dá)、攝像頭等傳感器的仿真,模擬其在復(fù)雜環(huán)境下的信號特性(如噪聲、畸變、不同光照下的圖像效果)。決策層測試需支持路徑規(guī)劃、行為預(yù)測算法的驗證,分析不同場景下的決策安全性;控制層則需結(jié)合車輛動力學(xué)模型,測試轉(zhuǎn)向、制動指令的執(zhí)行效果。軟件還應(yīng)具備場景回放與數(shù)據(jù)分析功能,量化算法的性能指標(biāo),為自動駕駛系統(tǒng)(尤其是L2+級輔助駕駛)的迭代優(yōu)化提供可靠依據(jù)。自動駕駛汽車仿真測試軟件需模擬復(fù)雜路況,以驗證算法在多樣場景下的可靠性。江蘇電機(jī)控制汽車仿真與實車測試誤差大嗎
自動駕駛汽車仿真工具的準(zhǔn)確性,取決于其對路況、傳感器響應(yīng)等模擬的真實度。江蘇電機(jī)控制汽車仿真與實車測試誤差大嗎
自動駕駛汽車仿真工具的準(zhǔn)確性取決于場景覆蓋度、傳感器模型精度、動力學(xué)仿真能力與算法迭代適配性。在場景覆蓋方面,能生成海量多樣化場景(如極端天氣、特殊路況、復(fù)雜交通參與者交互)的工具更具優(yōu)勢,可測試算法的魯棒性;傳感器模型需準(zhǔn)確模擬激光雷達(dá)點云噪聲、攝像頭畸變、毫米波雷達(dá)信號衰減等特性,確保感知算法測試的真實性;動力學(xué)模型則需準(zhǔn)確反映車輛的加速、制動、轉(zhuǎn)向響應(yīng),驗證決策控制算法的執(zhí)行效果。支持多域聯(lián)合仿真、可導(dǎo)入高精度地圖與實時交通數(shù)據(jù)的工具更能提升準(zhǔn)確性,能模擬復(fù)雜交通參與者的交互行為。在實際應(yīng)用中,往往需要結(jié)合多種工具的優(yōu)勢,通過實車數(shù)據(jù)校準(zhǔn)模型參數(shù),實現(xiàn)對自動駕駛系統(tǒng)的準(zhǔn)確仿真測試。江蘇電機(jī)控制汽車仿真與實車測試誤差大嗎
- 江西整車動力性能汽車模擬仿真定制開發(fā) 2025-07-25
- 杭州神經(jīng)網(wǎng)絡(luò)控制器算法 2025-07-25
- 廣西汽車工業(yè)科學(xué)分析有什么用途 2025-07-25
- 成都神經(jīng)網(wǎng)絡(luò)智能控制算法哪個平臺靠譜 2025-07-25
- 云南新能源汽車電池科學(xué)分析怎么優(yōu)化 2025-07-24
- 山東整車制動性能汽車模擬仿真技術(shù)原理 2025-07-24
- 北京底盤控制汽車模擬仿真技術(shù)原理 2025-07-24
- 黑龍江自動駕駛汽車模擬仿真外包服務(wù) 2025-07-24
- 銀川動力系統(tǒng)汽車仿真項目報價 2025-07-24
- 江西汽車工業(yè)科學(xué)分析服務(wù)價格 2025-07-24
- 松江區(qū)電商平臺代運營費用 2025-07-25
- 無錫智能iOSAPP開發(fā) 2025-07-25
- 重慶機(jī)加工軟件商哪個好 2025-07-25
- 天津動態(tài)庫存更新軟件系統(tǒng)ERP對接 2025-07-25
- 湖南國外MSC Actran 2025-07-25
- 廣東單張服裝吊牌打印機(jī)廠家 2025-07-25
- 北京抓取力控系統(tǒng)供應(yīng)商 2025-07-25
- 遼寧半成品生產(chǎn)計劃 2025-07-25
- 西藏沃可倚pack電池箱品牌 2025-07-25
- 南京綜合電話交換系統(tǒng)指導(dǎo) 2025-07-25