西藏協作機器人力控搬運
在現代工業自動化領域,機器人力控技術正逐漸成為提升裝配效率和質量的創新力量。達寬科技的機器人力控解決方案專注于膠塞裝配任務,通過實時力反饋和自適應調整,確保每一個膠塞都能以比較好狀態完成裝配。這種技術的應用不僅減少了人工干預的需求,還縮短了裝配時間,提升了整體生產效率。機器人力控的優勢在于其對復雜裝配任務的優化能力。在膠塞裝配過程中,力控系統能夠實時感知并調整施加的力度,避免因力度不當導致的部件損壞或裝配失敗。這種自適應能力使得機器人能夠適應不同規格的膠塞,減少了調試時間和人力成本。用戶體驗方面,機器人力控的引入提升了操作的便捷性和安全性。傳統裝配中可能出現的碰撞和過載問題,在力控系統的實時監控下得以有效避免。操作人員無需擔心設備的力度控制問題,只需專注于任務的執行。這種智能化的力控技術不僅提升了生產效率,還為企業提供了更可靠的生產保障。借助機器人力控,達寬科技提供的解決方案幫助企業更好地控制生產過程中的操作力,提升生產線效率。西藏協作機器人力控搬運

在現代服務器制造中,機器人力控技術正逐漸改變傳統裝配模式。達寬科技推出的力控解決方案,通過實時力反饋和自適應調整,為服務器線束裝配提供了智能化支持。這種技術能夠確保每一個連接點的穩定性和一致性,從而提升產品質量和生產效率。機器人力控的優勢在于其靈活性和適應性。在服務器線束裝配過程中,力控系統能夠根據不同的裝配需求自動調整力度,避免因力度不當導致的部件損壞或連接失敗。對于需要頻繁更換產品的生產線,力控技術的自適應能力極大地簡化了操作流程,減少了調試時間和人力成本。此外,機器人力控的引入提升了生產安全性。傳統裝配過程中可能出現的碰撞和過載問題,在力控系統的實時監控下得以有效避免。這種智能化的力控技術不僅保護了設備和工件,還為操作人員提供了更安全的工作環境。達寬科技的力控解決方案還支持多種工業場景,無論是復雜線束還是高精度要求的任務,都能輕松應對。通過力控技術的應用,企業能夠實現更高效的生產模式,同時降低維護成本和次品率,為企業的長遠發展奠定堅實基礎。協作機器人力控監測借助機器人力控,達寬科技為企業提供更加安全的生產模式,有效降低了操作風險。

在現代制造業中,機器人力控技術的應用正改變著傳統的裝配方式。達寬科技作為力控領域的創新者,其推出的力控解決方案為齒輪裝配等復雜任務提供了全新的優化路徑。通過力控技術,機器人能夠在裝配過程中實時感知并調整力度,確保每一個齒輪都能以比較好狀態完成裝配。這種技術的優勢在于其靈活性和適應性。力控系統能夠根據不同的裝配需求自動調整力度,避免因力度不當導致的部件損壞或裝配失敗。對于需要頻繁更換產品的生產線,力控技術的自適應能力極大地簡化了操作流程,減少了調試時間和人力成本。用戶體驗方面,機器人力控的引入提升了操作的便捷性和安全性。傳統裝配中可能出現的碰撞和過載問題,在力控系統的實時監控下得以有效避免。這種智能化的力控技術不僅提升了生產效率,還為企業提供了更可靠的生產保障。
復雜工況下的穩定輸出,機器人力控賦能高效生產
齒輪裝配常面臨多規格、小批量的生產挑戰。達寬科技的機器人力控系統支持柔性化參數配置,通過預設不同模數、材質的齒輪裝配工藝包,實現快速換線生產。例如在減速機裝配中,系統可自動識別齒輪組配合間隙,并基于力控算法優化壓裝軌跡,既保障裝配效率,又避免過載導致的部件變形。這種靈活性與穩定性的結合,讓企業能夠高效應對定制化需求,縮短產品交付周期。
人機協作再升級,降低精密裝配門檻
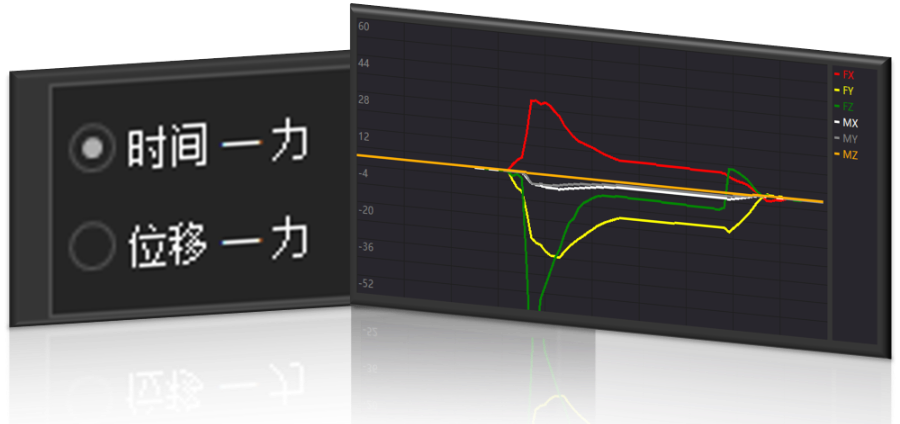
達寬科技將機器人力控技術與可視化操作界面深度融合,極大簡化齒輪裝配的編程復雜度。操作人員可通過拖拽式指令設置裝配路徑與力控閾值,系統自動生成適配不同齒輪類型的作業方案。在微型齒輪組裝場景中,機器人能自主調節微牛頓級力度,完成肉眼難以觀測的精密對位。這種“智能引導+人工校驗”的協作模式,既降低了對熟練工人的依賴,又通過人機互補提升了裝配質量的可控性。 借助機器人力控,達寬科技優化了生產過程,幫助企業節省時間,提高工作效率和產品質量。
在曲軸裝配領域,機器人力控技術的應用正推動著生產效率和質量的雙重提升。達寬科技的力控解決方案通過實時力反饋和自適應調整,為曲軸裝配提供了智能化支持。這種技術能夠確保每一個裝配環節的穩定性和一致性,從而提升產品質量和生產效率。機器人力控的優勢在于其靈活性和適應性。在曲軸裝配過程中,力控系統能夠根據不同的裝配需求自動調整力度,避免因力度不當導致的部件損壞或裝配失敗。對于需要頻繁更換產品的生產線,力控技術的自適應能力極大地簡化了操作流程,減少了調試時間和人力成本。此外,機器人力控的引入提升了生產安全性。傳統裝配過程中可能出現的碰撞和過載問題,在力控系統的實時監控下得以有效避免。這種智能化的力控技術不僅保護了設備和工件,還為操作人員提供了更安全的工作環境。通過達寬科技的機器人力控技術,用戶可以有效避免過載問題,提升機器人的穩定性,確保高效安全的生產環境。青海機器人力控抓取
達寬科技的機器人力控系統幫助企業降低了生產過程中可能出現的安全隱患,確保了作業環境的安全性。西藏協作機器人力控搬運
機器人力控賦能智能制造,重塑高效生產新體驗在工業自動化快速發展的,機器人力控技術已成為推動生產革新的驅動力。達寬科技深耕機器人力控領域,通過高精度傳感器與智能算法,賦予機器人動態感知與自適應調節能力。無論是精密裝配、復雜曲面打磨,還是高靈敏度抓取,機器人力控技術均能實時響應環境變化,確保任務執行的穩定性和一致性。這種技術突破不僅有效減少人工干預,更能避免傳統剛性操作帶來的誤差,助力企業實現降本增效的長期目標。西藏協作機器人力控搬運
- 中國臺灣機器人力控廠家 2025-07-10
- 河北協作機器人力控廠家 2025-07-10
- 安徽工業機器人力控測試 2025-07-09
- 青海工業機器人力控使用方法 2025-07-09
- 天津工業機器人力控使用方法 2025-07-09
- 中國臺灣工業機器人力控 2025-07-09
- 福建機器人力控廠家 2025-07-09
- 重慶機器人力控技術指導 2025-07-09
- 重慶機器人力控優點 2025-07-09
- 天津工業機器人力控設計 2025-07-09
- 無錫高科技社交APP 2025-07-10
- 上海大幅面膠片掃描儀廠家推薦 2025-07-10
- 海口學校智能化弱電系統集成排行榜 2025-07-10
- 常州科技網絡系統集成項目指導 2025-07-10
- 普陀區通信網絡安全防護二級通信網絡安全防護測評流程 2025-07-10
- 浙江企來搭AI數字化轉型 2025-07-10
- 深圳3.1寸手機屏價格 2025-07-10
- 項目型智能制造執行管理系統軟件 2025-07-10
- 蘇州省電智慧消防批發價 2025-07-10
- 上海安防監控多少錢 2025-07-10