寧夏懸臂型中負載直交機械手模具廠家
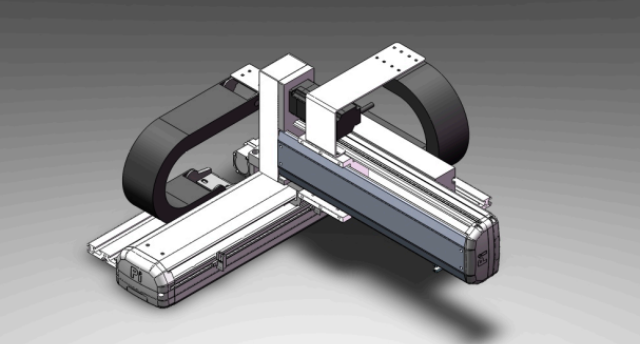
皮帶型直交機械手的工作機制:皮帶型直交機械手是直交機械手的一種常見類型,其結構設計獨具特點。它主要由驅動系統、傳動系統、控制系統和工作臺組成。驅動系統通常采用電機,為機械手的運動提供動力。傳動系統則依靠皮帶和皮帶輪來傳遞動力,當電機運轉時,帶動皮帶輪轉動,進而使皮帶帶動機械手的執行部件在導軌上做直線運動。這種傳動方式具有結構簡單、成本較低、運行平穩等優點。控制系統負責對電機的轉速、轉向以及運動時間進行精確控制,從而實現機械手在不同位置的精確定位和動作順序的準確執行。工作臺用于承載和固定操作的工件或工具,配合機械手的運動完成物料搬運、裝配等任務,在一些對成本敏感且對精度要求適中的生產場景中應用普遍。 點膠作業時,直交機械手動作準確,膠點均勻,品質上乘!寧夏懸臂型中負載直交機械手模具廠家
直交機械手的動力驅動系統主要由電機和傳動裝置組成。常見的電機類型有伺服電機、步進電機等。伺服電機具有響應速度快、控制精度高、運行平穩等優點,能夠精確控制機械手的運動速度和位置,適用于對運動性能要求較高的應用。步進電機則成本相對較低,在一些對精度要求不是特別苛刻的場合有廣泛應用。傳動裝置將電機的旋轉運動轉化為機械手的直線運動,如前面所述的滾珠絲桿傳動,還有同步帶傳動等。同步帶傳動具有傳動效率高、噪音低、無需潤滑等特點,但其精度相對滾珠絲桿傳動略低。合理選擇電機和傳動裝置,能夠根據直交機械手的具體應用需求,實現比較好的動力性能和性價比。 安徽懸臂型中負載直交機械手模組擁有機器人視覺和力度感知的直交機械手,準確操作,適應復雜環境!
直交機械手的精度控制技術精度是直交機械手的關鍵性能指標之一。為實現高精度控制,一方面在機械結構上采用高精度的滾珠絲桿、直線導軌等部件,并嚴格控制加工精度和裝配精度,減少機械間隙帶來的誤差。另一方面,在控制系統中運用先進的算法和傳感器技術。例如,通過高精度的編碼器實時監測電機的旋轉角度,進而精確計算機械手的位置,當檢測到位置偏差時,控制系統迅速做出調整,確保機械手始終按照預設軌跡運動。此外,還可采用誤差補償技術,對機械結構的固有誤差以及運行過程中因溫度變化、負載變化等因素產生的誤差進行補償,從而進一步提高直交機械手的定位精度,滿足對精度要求極高的應用場景,如精密儀器制造、生物醫療設備生產等。
直交機械手的使用年限受多種因素影響。一般而言,質量可靠的直交機械手在正常使用和維護條件下,具備較長的使用壽命。例如,部分品牌的直交機械手宣稱可達80000公里免維護,這意味著在大量的運行里程內,其關鍵部件能保持良好的工作狀態,無需頻繁維修更換。這得益于其采用的優等材料以及先進的制造工藝,如抗大力矩載荷的4列圓弧溝槽2點接觸導軌,極大提升了導軌的耐用性。當然,實際使用年限還與工作環境、負載大小、運行頻率等密切相關。在惡劣環境或高負載、高頻率運行下,需加強維護保養,以確保其長期穩定運行,延長使用壽命。 直交機械手廣泛應用于機械行業,助力生產,提升效率!
直交機械手在醫療行業的應用挑戰與解決方案:醫療行業對設備的精度、可靠性以及安全性要求極高,直交機械手在該領域的應用面臨諸多挑戰。首先,醫療環境對設備的潔凈度要求苛刻,直交機械手需要具備良好的防塵、防細菌設計,以防止細菌滋生與傳播。為此,可采用特殊的表面處理工藝,使機械手表面光滑且不易吸附灰塵與細菌,同時在結構設計上減少易積塵的縫隙與角落。其次,醫療操作往往涉及高精度的動作,如微創手術中的器械操作,這對機械手的定位精度與運動穩定性提出了極高要求。通過采用更高精度的傳感器、優化控制算法以及提升機械結構的剛性等措施,能夠有效提高機械手的精度與穩定性。此外,醫療設備的安全性至關重要,直交機械手需要配備多重安全防護裝置,如急停按鈕、安全光幕等,確保在使用過程中不會對醫護人員與患者造成傷害。 直交機械手可實現多點定位,位置精確,滿足多樣需求!河南三抽直交機械手廠家
直立式直交機械手,節省空間,垂直作業高效便捷!寧夏懸臂型中負載直交機械手模具廠家
直交機械手與工業的融合發展:工業強調智能制造和數字化轉型,直交機械手在這一發展浪潮中扮演著關鍵角色,與工業理念深度融合。通過物聯網技術,直交機械手可以實時連接到生產網絡中,實現設備之間的數據共享和互聯互通。其運行狀態、工作參數、故障信息等都能實時傳輸到生產管理系統,便于管理人員進行遠程監控和故障診斷,提高設備的維護效率和生產的穩定性。同時,借助大數據分析和云計算技術,對機械手的運行數據進行深入分析,優化運動軌跡和生產流程,實現生產過程的智能化優化。此外,直交機械手與其他智能設備協同工作,構建起高度自動化、智能化的生產系統,推動工業生產向智能化、柔性化方向邁進,助力企業在工業時代提升競爭力。 寧夏懸臂型中負載直交機械手模具廠家
- 遼寧自鎖電動缸廠家 2025-08-02
- 福建國產模組工廠 2025-08-02
- 江西懸臂型輕負載直交機械手 2025-08-01
- 貴州十字型中負載直交機械手哪家好 2025-08-01
- 浙江懸臂型中負載直交機械手 2025-08-01
- 江西精密驅動電動缸設置 2025-08-01
- 廣西步進電動缸工廠 2025-08-01
- 廣州繼電器模組品牌對比 2025-08-01
- 上海龍門型重負載直交機械手多少錢 2025-08-01
- 天津交流電動缸 2025-08-01
- 長寧區什么是生態環境檢測 2025-08-02
- 山東銷售烘干房大概費用 2025-08-02
- 安徽中國臺灣原裝無心磨床代理商 2025-08-02
- 濟南耐熱鑄鐵件 2025-08-02
- 山東使用回流比控制柜咨詢問價 2025-08-02
- 空調服配件直流空調服風扇變速 2025-08-02
- 徐匯區附近乳化機價目表 2025-08-02
- 遼寧道路普通貨物運輸誠信合作 2025-08-02
- 誘導衰減測試系統 2025-08-02
- 湖州附近CNC數控系統廠家電話 2025-08-02