流水機器人點焊生產(chǎn)線搭建
隨著人工智能和機器學(xué)習(xí)技術(shù)的發(fā)展,機器人點焊生產(chǎn)線的未來將更加智能化。未來的機器人將具備更強的自適應(yīng)能力,能夠根據(jù)實時反饋調(diào)整焊接參數(shù),提高焊接質(zhì)量。此外,協(xié)作機器人(Cobot)的出現(xiàn)使得機器人與人類工人之間的協(xié)作更加緊密,能夠在同一工作環(huán)境同完成任務(wù)。數(shù)據(jù)分析和云計算技術(shù)的應(yīng)用也將使得生產(chǎn)線的管理更加高效,實時監(jiān)控焊接質(zhì)量,預(yù)測設(shè)備故障,降低維護成本。總之,機器人點焊生產(chǎn)線的未來將是一個智能、高效、靈活的生產(chǎn)模式。機器人焊接技術(shù)在航空航天領(lǐng)域也有應(yīng)用。流水機器人點焊生產(chǎn)線搭建

盡管機器人點焊生產(chǎn)線具有諸多優(yōu)勢,但在實施過程中仍面臨一些挑戰(zhàn)。首先,初期投資成本較高,企業(yè)需要投入大量資金用于設(shè)備采購和系統(tǒng)集成,這對中小企業(yè)來說可能是一個負擔。其次,技術(shù)人員的短缺也是一個問題,企業(yè)需要具備專業(yè)的技術(shù)團隊來進行設(shè)備的維護和編程。此外,生產(chǎn)線的布局和工藝設(shè)計也需要進行合理規(guī)劃,以確保機器人能夠高效地完成焊接任務(wù)。蕞后,企業(yè)在轉(zhuǎn)型過程中可能會遇到員工的抵觸情緒,因此需要通過培訓(xùn)和溝通來提高員工對新技術(shù)的接受度。盡管面臨挑戰(zhàn),但通過合理的規(guī)劃和管理,企業(yè)仍然能夠充分發(fā)揮機器人點焊生產(chǎn)線的優(yōu)勢,實現(xiàn)生產(chǎn)效率和產(chǎn)品質(zhì)量的雙重提升。徐州流水機器人點焊生產(chǎn)線搭建點焊機器人能夠快速完成大批量生產(chǎn)任務(wù)。
隨著科技的不斷進步,機器人點焊生產(chǎn)線的未來發(fā)展趨勢將更加智能化和靈活化。人工智能和機器學(xué)習(xí)技術(shù)的應(yīng)用,將使得機器人能夠自主學(xué)習(xí)和優(yōu)化焊接參數(shù),進一步提升焊接質(zhì)量和效率。同時,隨著物聯(lián)網(wǎng)技術(shù)的發(fā)展,機器人點焊生產(chǎn)線將實現(xiàn)更高程度的互聯(lián)互通,能夠?qū)崟r監(jiān)控生產(chǎn)狀態(tài),進行數(shù)據(jù)分析和故障預(yù)測。此外,環(huán)保和可持續(xù)發(fā)展也將成為未來機器人點焊生產(chǎn)線設(shè)計的重要考量,開發(fā)出更節(jié)能、低排放的焊接技術(shù)將是行業(yè)發(fā)展的重要方向。
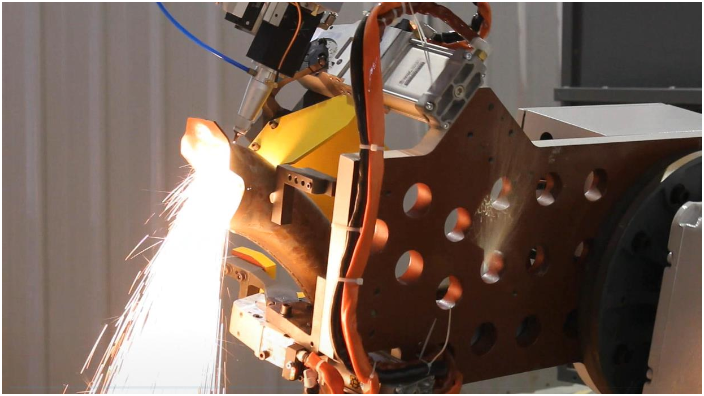
焊接段是機器人點焊生產(chǎn)線的中心工作段。在這個段落中,機器人使用焊接設(shè)備對原料進行焊接。焊接設(shè)備可以是電弧焊、激光焊或者其他類型的焊接技術(shù)。機器人根據(jù)預(yù)先設(shè)定的程序和路徑,將焊接頭按照要求進行焊接。焊接段通常需要高度精確的控制和監(jiān)測,以確保焊接質(zhì)量和焊接強度。質(zhì)量檢測段是機器人點焊生產(chǎn)線的關(guān)鍵工作段之一。在這個段落中,焊接完成的產(chǎn)品被送入質(zhì)量檢測設(shè)備進行檢測和評估。質(zhì)量檢測設(shè)備可以使用非破壞性測試方法,如X射線檢測或超聲波檢測,來檢查焊接接頭的質(zhì)量和完整性。如果產(chǎn)品不符合質(zhì)量標準,它將被標記為次品并進行后續(xù)處理。機器人焊接技術(shù)在重工業(yè)中也有廣泛應(yīng)用。

個性化解決方案:為了滿足不同客戶的特定需求,設(shè)計時應(yīng)提供個性化的解決方案。這包括對機器人的負載能力、工作范圍以及附加軸等進行定制,以適應(yīng)不同大小和形狀的工件。"我們的產(chǎn)品供貨時間短,可實現(xiàn)點焊作業(yè)自動化的個性化解決方案"。高效節(jié)能技術(shù):在設(shè)計點焊生產(chǎn)線時,應(yīng)采用高效節(jié)能的焊接技術(shù),如KUKA.RoboSpin,該技術(shù)通過在焊接過程中旋轉(zhuǎn)電極以減少磨損并提高鋁點焊的質(zhì)量。"KUKA.Robospin可使鋁的點焊磨損小和質(zhì)量改善"。模擬仿真技術(shù):利用模擬仿真技術(shù)對生產(chǎn)線進行"虛擬現(xiàn)實"設(shè)計,提前對焊槍可達性、線體節(jié)拍進行可行性驗證,實現(xiàn)機器人離線編程及電氣程序虛擬調(diào)試,以提高生產(chǎn)線設(shè)計的準確性和效率。"全工序所有生產(chǎn)線通過搭建3D數(shù)字化模型,提前對焊槍可達性、線體節(jié)拍進行可行性驗證"。點焊機器人能夠?qū)崿F(xiàn)高重復(fù)性和低誤差。徐州流水機器人點焊生產(chǎn)線搭建
通過智能監(jiān)控,生產(chǎn)線的故障率降低。流水機器人點焊生產(chǎn)線搭建
一條完整的機器人點焊生產(chǎn)線通常由多個關(guān)鍵組成部分構(gòu)成,包括工業(yè)機器人、焊接控制系統(tǒng)、焊接***、工件夾具和輸送系統(tǒng)等。工業(yè)機器人是生產(chǎn)線的中心,負責執(zhí)行焊接任務(wù)。焊接控制系統(tǒng)則用于編程和監(jiān)控焊接過程,確保焊接參數(shù)的準確性。焊接***是實現(xiàn)焊接的工具,其設(shè)計和性能直接影響焊接質(zhì)量。工件夾具用于固定待焊接的工件,確保其在焊接過程中的穩(wěn)定性。輸送系統(tǒng)則負責將工件在生產(chǎn)線上移動,實現(xiàn)自動化生產(chǎn)。各個組成部分的協(xié)調(diào)配合,使得機器人點焊生產(chǎn)線能夠高效、穩(wěn)定地運行。流水機器人點焊生產(chǎn)線搭建
- 黑龍江智能工廠自動化生產(chǎn)線集成商 2025-07-30
- 吉林自動化生產(chǎn)線工作站 2025-07-30
- 湖南機器人弧焊自動化生產(chǎn)線解決方案 2025-07-30
- 湖北機器人自動化生產(chǎn)線工作站 2025-07-30
- 遼寧機器人點焊自動化生產(chǎn)線解決方案 2025-07-30
- 浙江智能自動化生產(chǎn)線哪家好 2025-07-30
- 上海機器人制造自動化生產(chǎn)線檢測 2025-07-30
- 遼寧機器人焊接自動化生產(chǎn)線多少錢 2025-07-30
- 遼寧流水自動化生產(chǎn)線供應(yīng)商 2025-07-30
- 廣東機器人弧焊自動化生產(chǎn)線上下料 2025-07-30
- 海南省橡膠冷卻輸送機費用 2025-07-30
- 河北溫室玻璃鋼風機廠家 2025-07-30
- 上海戶外光伏支架價格 2025-07-30
- 江蘇進口清洗機用戶 2025-07-30
- 普陀區(qū)購買三坐標圖片 2025-07-30
- 閔行區(qū)三維掃描儀售后服務(wù) 2025-07-30
- 云浮一出一載帶復(fù)卷機企業(yè) 2025-07-30
- 金華耐壓聚氨酯地坪漆 2025-07-30
- 上海智能重量分選稱重機生產(chǎn)廠家 2025-07-30
- 徐州二層升降橫移式立體智能車庫規(guī)格 2025-07-30