-
 河北自動化控制系統型號
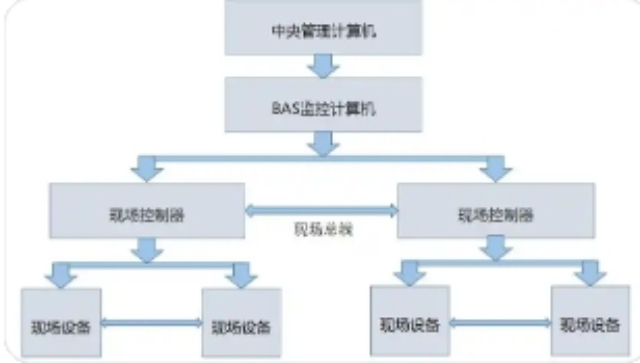
河北自動化控制系統型號控制系統,分散、集散控制系統(DCS),綜合了計算機、通訊、顯示和控制等4C技術,主要原理是分散控制、集中操作、分級管理,集散系統是多級計算機系統,包括過程控制和過程監控。DCS硬件主要包括控制站、操作站、工程師站、過程控制網;DCS系統結構主要包括分散的過程...
2025-07-22 -
 靜安區私人驅動器
靜安區私人驅動器通信協議的可擴展性對于無錫文亞機電自動化設備有限公司驅動器的未來發展具有重要意義。隨著工業自動化技術向智能化、數字化方向不斷演進,對通信協議的功能要求也在不斷增加。文亞機電在設計驅動器的通信協議時,充分考慮了可擴展性。例如,其支持的通信協議能夠方便地添加新的功...
2025-07-22 -
 小型工業機器人標準
小型工業機器人標準1920年捷克作家卡雷爾·查培克在其劇本《羅薩姆的***機器人》中**早使用機器人一詞,劇中機器人“Robot”這個詞的本意是苦力,即劇作家筆下的一個具有人的外表,特征和功能的機器,是一種人造的勞力。它是**早的工業機器人設想。20世紀40年代中...
2025-07-22 -
 湖北傳感器產品介紹
湖北傳感器產品介紹自檢、自校、自診斷功能——普通傳感器需要定期檢驗和標定,以保證它在正常使用時足夠的準確度,這些工作一般要求將傳感器從使用現場拆卸送到實驗室或檢驗部門進行。對于在線測量傳感器出現異常則不能及時診斷。采用智能傳感器情況則大有改觀,首先自診斷功能在電源接通時進行自檢...
2025-07-21 -
 哪些自動化控制系統標準
哪些自動化控制系統標準20世紀40年代中發明的電子數字計算機開創了數字程序控制的新紀元﹐雖然當時還局限于自動計算方面,但ENIAC和EDVAC的制造成功﹐開創了電子數字程序控制的新紀元。電子數字計算機的發明為60~70年代在控制系統中廣泛應用程序控制和邏輯控制以及廣泛應用電子數字計...
2025-07-21 -
錫山區自動化控制系統有幾種
自動裝置的出現和應用是在18世紀。自動化技術形成時期是在18世紀末-20世紀30年代。1788年英國機械師J.瓦特發明離心式調速器(又稱飛球調速器),并把它與蒸汽機的閥門連接起來,構成蒸汽機轉速的閉環自動控制系統。瓦特的這項發明開創了近代自動調節裝置應用的新紀...
2025-07-21 -
錫山區附近傳感器
通常情況下,傳感器的實際靜態特性輸出是條曲線而非直線。在實際工作中,為使儀表具有均勻刻度的讀數,常用一條擬合直線近似地**實際的特性曲線、線性度(非線性誤差)就是這個近似程度的一個性能指標。擬合直線的選取有多種方法。如將零輸入和滿量程輸出點相連的理論直線作為擬...
2025-07-21 -
 南京傳感器機械結構
南京傳感器機械結構精度是傳感器的一個重要的性能指標,它是關系到整個測量系統測量精度的一個重要環節。傳感器的精度越高,其價格越昂貴,因此,傳感器的精度只要滿足整個測量系統的精度要求就可以,不必選得過高。這樣就可以在滿足同一測量目的的諸多傳感器中選擇比較便宜和簡單的傳感器阿特拉斯空...
2025-07-21 -
 甘肅使用工業機器人
甘肅使用工業機器人隨著計算機微型產業的不斷進步,“機械人”的用途越來越***。而且,“機械人”的動平衡和模仿人類各種復雜的行為動作也越來越近似。現代“機械人”或“機械生物”已經具備了聲音、視覺、知覺的所有傳感識別,并可根據輸入到電腦芯片中的信息來實施自身的行為自動控制能力。它不...
2025-07-21 -
 黃浦區便宜的工業機器人
黃浦區便宜的工業機器人機器人機械本體由于加工誤差和裝配誤差的原因,難以避免會和理論數學模型存在偏差,會降低機器人TCP精度和軌跡精度,如在焊接和離線編程使用時會受到嚴重影響。通過檢測和算法標定補償機器人的模型參數,可以較好地解決此問題。(4)工藝包完善控制系統要與實際工程應用相結合...
2025-07-21 -
 松江區使用自動化控制系統
松江區使用自動化控制系統自動化(Automation)是指機器設備、系統或過程(生產、管理過程)在沒有人或較少人的直接參與下,按照人的要求,經過自動檢測、信息處理、分析判斷、操縱控制,實現預期的目標的過程。自動化技術***用于工業、農業、***、科學研究、交通運輸、商業、醫療、服務和...
2025-07-20 -
松江區工業機器人應用范圍
其實,這方面的擔心完全沒有必要。智能機器人并非無所不能,它的智商只相當于4歲的兒童,機器人的“常識”比正常成年人就差得更遠了。科學家尚未搞清楚人類是如何學習和積累“常識”的,因此,將其應用到計算機軟件上也就無從談起。美國科學家羅伯特·斯隆近日表示,人工智能研究...
2025-07-20 -
 梁溪區驅動器應用范圍
梁溪區驅動器應用范圍電機額定功率與無錫文亞機電自動化設備有限公司驅動器的匹配程度關乎驅動系統的安全與性能。若電機額定功率大于驅動器的額定輸出功率,在電機滿載運行時,驅動器會處于過載狀態。這就如同小馬拉大車,驅動器內部的功率元件會承受過大的電流,容易引發過熱保護甚至燒毀。例如在大型...
2025-07-20 -
宜興私人傳感器
光敏傳感器是最常見的傳感器之一,它的種類繁多,主要有:光電管、光電倍增管、光敏電阻、光敏三極管、太陽能電池、紅外線傳感器、紫外線傳感器、光纖式光電傳感器、色彩傳感器、CCD和CMOS圖像傳感器等。它的敏感波長在可見光波長附近,包括紅外線波長和紫外線波長。光傳感...
2025-07-20 -
金山區驅動器客服電話
周期性負載在工業生產中較為常見,如往復式壓縮機、印刷機等設備。無錫文亞機電自動化設備有限公司的驅動器在應對周期性負載時,采用了專門的控制策略。驅動器通過對負載周期的精確監測和分析,**負載變化,調整輸出參數。例如在印刷機工作過程中,紙張的輸送和印刷動作呈周期性...
2025-07-20 -
 閔行區微型傳感器
閔行區微型傳感器在這種轉換過程中有許多物理量(例如壓力、流量、加速度等)常常需要先變換為位移,然后再將位移變換成電量。因此位移傳感器是一類重要的基本傳感器。在生產過程中,位移的測量一般分為測量實物尺寸和機械位移兩種。機械位移包括線位移和角位移。按被測變量變換的形式不同,位移傳...
2025-07-20 -
廣東定做傳感器
霍爾傳感器分為線性型霍爾傳感器和開關型霍爾傳感器兩種。1、線性型霍爾傳感器由霍爾元件、線性放大器和射極跟隨器組成,它輸出模擬量。2、開關型霍爾傳感器由穩壓器、霍爾元件、差分放大器,斯密特觸發器和輸出級組成,它輸出數字量。霍爾電壓隨磁場強度的變化而變化,磁場越強...
2025-07-20 -
鎮江附近哪里有工業機器人
工業機器人懸臂結構極易在多軸聯動、重載及快速起停時引起抖動。機器人本體剛度要與電機伺服剛度參數相匹配,剛度過高,會造成振動,剛度過低會造成起停反應緩慢。機器人在不同的位置和姿態,以及在不同的工裝負載下剛度都不一樣,很難通過提前設置伺服剛度值能滿足所有工況的需求...
2025-07-20 -
 普陀區私人自動化控制系統
普陀區私人自動化控制系統工業自動化控制系統的主要功能包括:1.數據采集與監測:系統可以實時收集設備的工作狀態、產品數量、質量等信息,以便于管理者做出準確的決策。2.自動控制:系統可以根據預設的程序,自動控制設備的運行,確保生產過程的穩定和一致性。3.優化生產:系統可以分析歷史數據,提...
2025-07-20 -
 無錫工業機器人圖片
無錫工業機器人圖片**標準化組織采納了美國機器人協會給機器人下的定義:“一種可編程和多功能的,用來搬運材料、零件、工具的操作機;或是為了執行不同的任務而具有可改變和可編程動作的專門系統。” 機器人能力的評價標準包括:智能,指感覺和感知,包括記憶、運算、比較、鑒別、判斷、決策、學...
2025-07-20 -
崇明區驅動器應用范圍
在極端低溫環境下,如極地科考設備、冷庫**溫區設備等,無錫文亞機電自動化設備有限公司的驅動器面臨著更為嚴苛的性能挑戰。極端低溫會使電子元件的性能急劇下降,甚至出現結冰、脆裂等情況。文亞機電為保障驅動器在極端低溫下的性能,從多個方面進行優化。在材料選擇上,采用低...
2025-07-20 -
崇明區定做傳感器
壓力壓力傳感器引是工業實踐中**為常用的一種傳感器,其廣泛應用于各種工業自控環境,涉及水利水電、鐵路交通、智能建筑、生產自控、航空航天、**、石化、油井、電力、船舶、機床、管道等眾多行業。超聲波測距離超聲波測距離傳感器采用超聲波回波測距原理,運用精確的時差測量...
2025-07-20 -
 黑龍江傳感器哪家好
黑龍江傳感器哪家好傳感器技術及產業特點傳感器技術及其產業的特點可以歸納為:基礎、應用兩頭依附;技術、投資兩個密集;產品、產業兩大分散。基礎、應用兩頭依附基礎依附,是指傳感器技術的發展依附于敏感機理、敏感材料、工藝設備和計測技術這四塊基石。敏感機理千差萬別,敏感材料多種多樣,工藝...
2025-07-20 -
福建驅動器怎么用
在實際工業生產中,存在一些不規則負載,其大小和變化規律難以預測,如垃圾處理設備中的攪拌電機負載。無錫文亞機電自動化設備有限公司的驅動器憑借先進的智能算法,能夠對不規則負載實現良好適應。驅動器通過實時監測電機的電流、轉速等參數,利用內置的智能控制系統分析負載變化...
2025-07-20 -
青浦區自動化控制系統客服電話
自動控制系統是指用一些自動控制裝置,對生產中某些關鍵性參數進行自動控制,使它們在受到外界干擾(擾動)的影響而偏離正常狀態時,能夠被自動地調節而回到工藝所要求的數值范圍內。在生產過程中,各種工藝條件不可能是一成不變的。特別是化工生產,大多數是連續性生產,各設備相...
2025-07-20 -
 購買驅動器互惠互利
購買驅動器互惠互利無錫文亞機電自動化設備有限公司的驅動器與電機的參數匹配程度,直接關系到轉矩輸出性能。電機如同汽車的發動機,轉矩則是發動機輸出的 “力氣”。文亞機電驅動器根據電機的額定參數來調整輸出策略。若電機的額定轉矩與驅動器不匹配,比如電機額定轉矩大,而驅動器無法提供相應大...
2025-07-20 -
楊浦區微型工業機器人
控制系統的任務是根據機器人的作業指令以及從傳感器反饋回來的信號,支配機器人的執行機構去完成規定的運動和功能。如果機器人不具備信息反饋特征,則為開環控制系統;具備信息反饋特征,則為閉環控制系統。根據控制原理可分為程序控制系統、適應性控制系統和人工智能控制系統。根...
2025-07-20 -
 山東微型自動化控制系統
山東微型自動化控制系統工廠或事業單位的人、財、物、生產、辦公等業務管理的自動化控制,是以信息處理為**的綜合性技術,涉及電子計算機、通信系統與控制等學科。一般采用由多臺具有高速處理大量信息能力的計算機和各種終端組成的局部網絡。現代已在管理信息系統的基礎上研制出決策支持系統(DSS)...
2025-07-19 -
遼寧傳感器互惠互利
利用激光技術進行測量的傳感器。它由激光器、激光檢測器和測量電路組成。激光傳感器是新型測量儀表,它的優點是能實現無接觸遠距離測量,速度快,精度高,量程大,抗光、電干擾能力強等。激光傳感器工作時,先由激光發射二極管對準目標發射激光脈沖。經目標反射后激光向各方向散射...
2025-07-19 -
嘉定區自動化控制系統怎么用
隨著科技的進步,科學儀器的結構。日益簡化,體積縮小,重量減輕,操作也更方便,價格也逐步降低,而且能在工業條件下操作,因此在過去只能在實驗室內進行離線操作的科學儀器,現在可以在生產現場進行在線運行了。例如質譜儀居武鋼的高爐上試用,用來分析爐頂煤氣的成分。從應用的...
2025-07-19