-
 湖南驅動器怎么用
湖南驅動器怎么用電源紋波不僅影響無錫文亞機電自動化設備有限公司驅動器的內部電路,還會干擾其通信功能。在工業自動化系統中,文亞機電驅動器常需與上位機、其他設備進行通信,以接收指令和反饋運行狀態。當電源紋波存在時,就像嘈雜的環境干擾人們正常交流,會干擾驅動器通信線路中的信號傳輸。...
2025-07-17 -
 寧夏進口傳感器
寧夏進口傳感器傳感器的特點包括:微型化、數字化、智能化、多功能化、系統化、網絡化,它不僅促進了傳統產業的改造和更新換代,而且還可能建立新型工業,從而成為21世紀新的經濟增長點。微型化是建立在微電子機械系統(MEMS)技術基礎上的,已成功應用在硅器件上做成硅壓力傳感器。玻璃封...
2025-07-16 -
 陜西整套驅動器
陜西整套驅動器溫度驟變同樣會對無錫文亞機電自動化設備有限公司的驅動器產生不利影響。在一些特殊工業場景,如冷庫與高溫加工車間交替作業的場所,驅動器可能短時間內經歷較大的溫度變化。溫度驟變會使驅動器內部不同材料的部件因熱脹冷縮程度不同,產生應力集中。例如,電路板與外殼之間的連接...
2025-07-16 -
 金山區定做工業機器人
金山區定做工業機器人人機協作隨著機器人從與人保持距離作業向與人自然交互并協同作業方面發展。拖動示教、人工教學技術的成熟,使得編程更簡單易用,降低了對操作人員的專業要求,熟練技工的工藝經驗更容易傳遞。 [5]2.自主化目前機器人從預編程、示教再現控制、直接控制、遙操作等**縱作業模...
2025-07-16 -
甘肅使用傳感器
傳感器的靜態特性是指對靜態的輸入信號,傳感器的輸出量與輸入量之間所具有相互關系。因為這時輸入量和輸出量都和時間無關,所以它們之間的關系,即傳感器的靜態特性可用一個不含時間變量的代數方程,或以輸入量作橫坐標,把與其對應的輸出量作縱坐標而畫出的特性曲線來描述。表征...
2025-07-16 -
 河南微型自動化控制系統
河南微型自動化控制系統自動控制系統由控制器和被控對象組成。但要實現復雜的控制任務,一個典型的自動控制系統通常還應當包括:定值元件、執行元件、測量變送元件和比較元件。經過20多年的發展,中國工業自動控制系統裝置制造行業取得了長足的發展。尤其是20世紀90年代以來,中國工業自動控制系統...
2025-07-16 -
安徽本地工業機器人
“機械人”為深海臥龍***應用于表達變形金剛人形形態的一個詞語。 “機械人”應用于變形金剛的人形形態的表達。 可以加上“形態”、“模式”等詞語:機械人形態,機械人模式。工業“機械人”或者“機械手” 常用來實施工序復雜、污染嚴重和人類不便于操作的工序,也可理解為...
2025-07-16 -
上海工業機器人機械結構
控制系統的任務是根據機器人的作業指令以及從傳感器反饋回來的信號,支配機器人的執行機構去完成規定的運動和功能。如果機器人不具備信息反饋特征,則為開環控制系統;具備信息反饋特征,則為閉環控制系統。根據控制原理可分為程序控制系統、適應性控制系統和人工智能控制系統。根...
2025-07-15 -
安徽自動化驅動器
電壓閃變對文亞機電驅動器的影響及防范電壓閃變是指電壓幅值在短時間內快速變化的現象,這對無錫文亞機電自動化設備有限公司的驅動器有著***影響。電壓閃變通常由大型沖擊性負載的頻繁啟停引起,如電焊機、電弧爐等設備。當文亞機電驅動器遭遇電壓閃變時,其內部的電源電路可能...
2025-07-15 -
宿遷便宜的傳感器
中國傳感器產業正處于由傳統型向新型傳感器發展的關鍵階段,它體現了新型傳感器向微型化、多功能化、數字化、智能化、系統化和網絡化發展的總趨勢。傳感器技術歷經了多年的發展,其技術的發展大體可分三代:***代是結構型傳感器,它利用結構參量變化來感受和轉化信號。第二代是...
2025-07-15 -
 寶山區小型工業機器人
寶山區小型工業機器人庫卡是一家總部位于德國奧格斯堡的工業機器人制造商,成立于1898年。**初,庫卡主要專注于室內和城市照明設備的制造,但隨后逐漸將業務擴展到工業機器人領域。工業機器人業務:庫卡以其高精度、高剛性和高可靠性而聞名,其機器人產品廣泛應用于汽車制造、物流、航空航天等領...
2025-07-15 -
 比較好的工業機器人常見問題
比較好的工業機器人常見問題1954年美國戴沃爾**早提出了工業機器人的概念,并申請了專利。該**的要點是借助伺服技術控制機器人的關節,利用人手對機器人進行動作示教,機器人能實現動作的記錄和再現。這就是所謂的示教再現機器人。現有的機器人差不多都采用這種控制方式。1959年UNIMATIO...
2025-07-15 -
河北大型驅動器
電壓閃變對文亞機電驅動器的影響及防范電壓閃變是指電壓幅值在短時間內快速變化的現象,這對無錫文亞機電自動化設備有限公司的驅動器有著***影響。電壓閃變通常由大型沖擊性負載的頻繁啟停引起,如電焊機、電弧爐等設備。當文亞機電驅動器遭遇電壓閃變時,其內部的電源電路可能...
2025-07-15 -
 湖北附近傳感器
湖北附近傳感器遲滯:傳感器在輸入量由小到大(正行程)及輸入量由大到小(反行程)變化期間其輸入輸出特性曲線不重合的現象成為遲滯。對于同一大小的輸入信號,傳感器的正反行程輸出信號大小不相等,這個差值稱為遲滯差值。4.重復性:重復性是指傳感器在輸入量按同一方向作全量程連續多次變化...
2025-07-15 -
宿遷工業機器人要多少錢
機器人的安裝是在在現場進行的,而真正的生產作業環境會受空間利用率等方面影響,致使機器人的很多姿態受到一定的限制,而這就很容易導致工業機器人在實際工作中,出現震動、移位等現象,并**終導致工業機器人無法按照設計的速度運作,因此在工業機器人安裝結束后,投入實際生產...
2025-07-15 -
 徐匯區傳感器圖片
徐匯區傳感器圖片傳感器的靈敏度是有方向性的。當被測量是單向量,而且對其方向性要求較高,則應選擇其它方向靈敏度小的傳感器;如果被測量是多維向量,則要求傳感器的交叉靈敏度越小越好。頻率響應特性傳感器的頻率響應特性決定了被測量的頻率范圍,必須在允許頻率范圍內保持不失真。實際上傳感器...
2025-07-15 -
寶山區使用工業機器人
在各類工廠的碼垛方面,自動化極高的機器人被廣泛應用,人工碼垛工作強度大,耗費人力,員工不僅需要承受巨大的壓力,而且工作效率低。搬運機器人能夠根據搬運物件的特點,以及搬運物件所歸類的地方,在保持其形狀的和物件的性質不變的基礎上,進行高效的分類搬運,使得裝箱設備每...
2025-07-15 -
 梁溪區哪些傳感器
梁溪區哪些傳感器按測量目物理型傳感器是利用被測量物質的某些物理性質發生明顯變化的特性制成的。化學型傳感器是利用能把化學物質的成分、濃度等化學量轉化成電學量的敏感元件制成的。生物型傳感器是利用各種生物或生物物質的特性做成的,用以檢測與識別生物體內化學成分的傳感器。按其構成基本型...
2025-07-15 -
南京整套工業機器人
智能化水平高隨著計算機控制技術的不斷進步,工業機器人將逐漸能夠明白人類的語言,同時工業機器人可以完成產品的組件,這樣就可以讓工人免除復雜的操作。工業生產中焊接機器人系統不僅能實現空間焊縫的自動實時跟蹤,而且還能實現焊接參數的在線調整和焊縫質量的實時控制,可以滿...
2025-07-15 -
 楊浦區驅動器機械結構
楊浦區驅動器機械結構恒功率負載在工業設備中也有應用,如機床的主軸驅動等。無錫文亞機電自動化設備有限公司的驅動器在驅動恒功率負載時,具有獨特的工作特點。隨著電機轉速升高,負載轉矩會相應減小,以保持功率恒定。文亞機電驅動器通過先進的控制算法,能夠精細調節輸出電壓和頻率,滿足恒功率負載...
2025-07-14 -
黑龍江傳感器
按作用形式可分為主動型和被動型傳感器。主動型傳感器又有作用型和反作用型,此種傳感器對被測對象能發出一定探測信號,能檢測探測信號在被測對象中所產生的變化,或者由探測信號在被測對象中產生某種效應而形成信號。檢測探測信號變化方式的稱為作用型,檢測產生響應而形成信號方...
2025-07-14 -
閔行區購買傳感器
自檢、自校、自診斷功能——普通傳感器需要定期檢驗和標定,以保證它在正常使用時足夠的準確度,這些工作一般要求將傳感器從使用現場拆卸送到實驗室或檢驗部門進行。對于在線測量傳感器出現異常則不能及時診斷。采用智能傳感器情況則大有改觀,首先自診斷功能在電源接通時進行自檢...
2025-07-14 -
 北京驅動器型號
北京驅動器型號溫度對無錫文亞機電自動化設備有限公司驅動器的散熱系統是一個嚴峻考驗。隨著驅動器功率密度的不斷提高,其在運行過程中產生的熱量也越來越多。若散熱系統無法有效將熱量散發出去,驅動器內部溫度將持續升高,影響性能和可靠性。文亞機電的驅動器散熱系統主要包括散熱片、散熱風扇...
2025-07-14 -
附近工業機器人常見問題
20世紀60年代,工業機器人發展迎來黎明期,機器人的簡單功能得到了進一步的發展。機器人傳感器的應用提高了機器人的可操作性,包括恩斯特采用的觸覺傳感器;托莫維奇和博尼在世界上**早的“靈巧手”上用到了壓力傳感器;麥卡錫對機器人進行改進,加入視覺傳感系統,并幫助麻...
2025-07-14 -
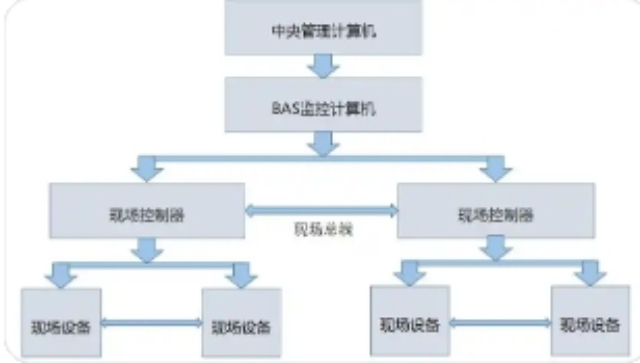
 湖北比較好的自動化控制系統
湖北比較好的自動化控制系統控制系統,分散、集散控制系統(DCS),綜合了計算機、通訊、顯示和控制等4C技術,主要原理是分散控制、集中操作、分級管理,集散系統是多級計算機系統,包括過程控制和過程監控。DCS硬件主要包括控制站、操作站、工程師站、過程控制網;DCS系統結構主要包括分散的過程...
2025-07-14 -
 錫山區附近哪里有自動化控制系統
錫山區附近哪里有自動化控制系統工廠或事業單位的人、財、物、生產、辦公等業務管理的自動化控制,是以信息處理為**的綜合性技術,涉及電子計算機、通信系統與控制等學科。一般采用由多臺具有高速處理大量信息能力的計算機和各種終端組成的局部網絡。現代已在管理信息系統的基礎上研制出決策支持系統(DSS)...
2025-07-14 -
 鹽城自動化控制系統機械結構
鹽城自動化控制系統機械結構自動化控制有半自動與全自動化,自動化控制是一種現代工業、農業、制造業等生產領域中機械電氣一體自動化集成控制技術和理論。自動化控制有半自動與全自動化自動化控制例如:機器、設備可以按照生產的要求和目的,進行自動化生產;全自動人只需要作為操作員,確定控制的要求和程序...
2025-07-14 -
河南驅動器客服電話
電源紋波是影響無錫文亞機電自動化設備有限公司驅動器運行的重要因素之一,其中發熱異常問題尤為突出。文亞機電驅動器在正常工作時,內部電路會有一定功耗產生熱量,而電源紋波的存在會加劇這一情況。由于紋波會導致驅動器內部電流出現波動,額外的電流波動使得電路元件工作狀態不...
2025-07-14 -
無錫自動化自動化控制系統
管理自動化:工廠或事業單位的人、財、物、生產、辦公等業務管理自動化,是以信息處理為**的綜合性技術,涉及電子計算機、通信系統與控制等學科。一般采用由多臺具有高速處理大量信息能力的計算機和各種終端組成的局部網絡。現代已在管理信息系統的基礎上研制出決策支持系統(D...
2025-07-14 -
小型工業機器人型號
電機選型必須要對電機的工作特性非常了解,并會對電機扭矩、功率、慣量進行計算和校核。(4)仿真分析進行靜力學和動力學的仿真分析,對電機、減速器的選型校核,對本體零部件進行強度、剛度校核,降低本體重量,提高機器人工作效率,降低成本。對三維模型進行模態分析,計算出固...
2025-07-14