-
 興安盟工程車盲區360全景價格
興安盟工程車盲區360全景價格對于工程車駕駛員而言,車頭盲區是容易被忽視卻又極具危險性的區域。尤其是大型渣土車、混凝土攪拌車,車頭高度較高,駕駛員坐在駕駛座上很難看清車頭下方及前方 1-2 米范圍內的情況,兒童、小型工具等往往會被完全遮擋。360 全景盲區監測預警系統通過安裝在車頭格柵或保險杠位置的攝像頭,將車頭下方及前方的實時畫面傳輸到顯示屏上,駕駛員在起步、低速行駛或通過人群密集區域時,只需 看一眼顯示屏,就能清楚了解車頭周圍是否有障礙物或人員。系統還會根據車輛的行駛速度和與障礙物的距離,自動調整預警靈敏度,當車輛低速靠近障礙物時,預警會更加及時和頻繁,有效避免 “鬼探頭” 等突發情況造成的事故。大尺寸高清顯示屏,操作...
-
 忻州特種車盲區360全景定制
忻州特種車盲區360全景定制混凝土泵車作業時,巨大的臂架展開猶如擎天之柱,其下方及周邊區域存在嚴重的視覺盲區,對現場人員安全構成巨大威脅。佳興偉誠工程車輛360全景駕駛輔助系統,專為解決泵車這一痛點而生。系統攝像頭不覆蓋車體底盤四周(重點監控支腿區域、車頭車尾),更創新性在關鍵臂架節點(如轉塔、1號臂根部)部署,通過佳興偉誠特有的多視角融合技術,將車身周圍地面狀況與臂架下方實時畫面整合呈現于駕駛室屏幕。操作手在操作遙控器或駕駛室內,即可清晰掌握支腿下方是否堅實平整、有無人員設備滯留、鋼筋網是否妨礙布管、臂架與臨近建筑物或高壓線的安全距離。系統可設置動態安全警戒區域,當人員或設備進入臂架下方高危區域時自動觸發聲光報警,為“...
-
 秦皇島工程車360全景找哪家
秦皇島工程車360全景找哪家在繁忙嘈雜的料場、攪拌站或港口碼頭,裝載機需要頻繁穿梭、轉向、舉升、裝卸物料,駕駛員視野受限是影響效率與安全的主要瓶頸。佳興偉誠工程車輛360全景駕駛輔助系統,為裝載機駕駛員裝上“清晰之眼”。系統攝像頭科學布置于駕駛室頂部、引擎罩兩側、后機罩及大臂根部,消除車頭巨大鏟斗及舉升動臂造成的龐大盲區。佳興偉誠先進的圖像拼接算法,在駕駛員前方屏幕實時呈現無縫連接的360度鳥瞰視圖,清晰顯示輪胎與料堆邊緣的距離、后方接近的車輛或人員、側方狹窄通道的通行空間以及舉升時鏟斗與上方障礙物(如料倉、車輛)的間隙。在堆料、取料、裝車等高頻操作中,駕駛員無需完全依賴經驗判斷,借助全景視圖即可控制車輛走位,一次到位完...
-
錫林郭勒消防車360全景定制
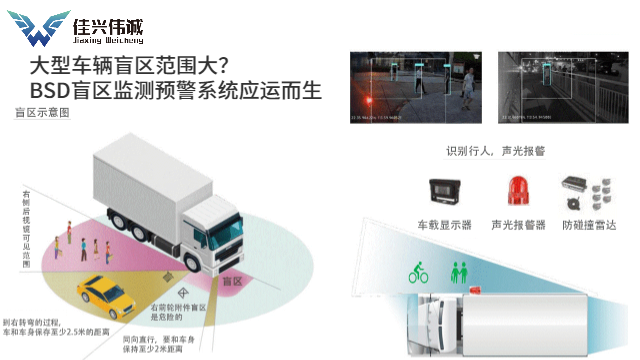
在工程建設領域,工程車的安全運營始終是重中之重,而盲區則是導致事故的 關鍵因素。工程車 360 全景盲區監測預警系統的出現,正是為了解決這一難題。對于體型龐大的工程車而言,駕駛員的視野存在諸多局限,車頭下方、車身側面、車尾等位置的盲區極易隱藏行人、小型車輛或障礙物,稍有不慎就可能引發碰撞事故。尤其是在建筑工地、礦山、港口等復雜作業環境中,人員與車輛混合作業頻繁,盲區風險更是被放大。這套系統通過分布在車輛四周的高清攝像頭,實時采集各個方位的畫面,經過算法處理后形成一幅完整的 360 度全景影像,直觀地呈現在駕駛室內的顯示屏上,讓駕駛員能夠清晰掌握車輛周圍 360 度的實時狀況,就像擁有了 “上帝...
-
 呼倫貝爾主動安全360全景設計
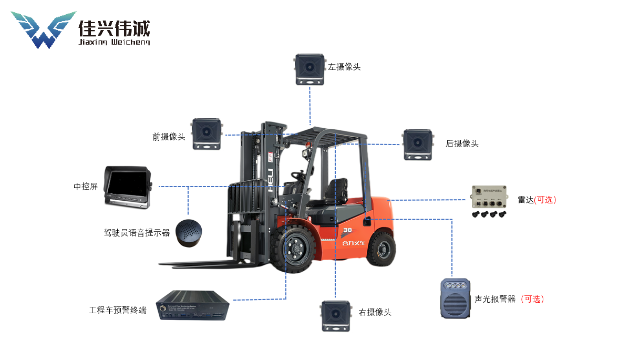
呼倫貝爾主動安全360全景設計工程車 360 全景盲區監測預警系統并非簡單的攝像頭拼接,其背后蘊含著復雜的技術邏輯。系統通常由多個高清廣角攝像頭、圖像處理器、顯示屏以及預警模塊組成。攝像頭一般安裝在車頭、車尾、左右后視鏡等關鍵位置,確保無死角覆蓋車輛周圍環境。這些攝像頭需要具備高分辨率、高動態范圍的特性,以適應強光、逆光、夜間等不同光照條件,保證在各種天氣和時段都能捕捉到清晰的畫面。圖像處理器則是系統的 “大腦”,它能快速對多個攝像頭采集的畫面進行畸變校正、拼接融合,消除畫面之間的重疊和錯位,形成一幅無縫銜接的全景圖像。同時,處理器還會對圖像中的移動物體、障礙物進行智能識別,一旦發現有物體進入預設的危險區域,就會通過聲音報...
-
鄂爾多斯工程車盲區360全景多少錢
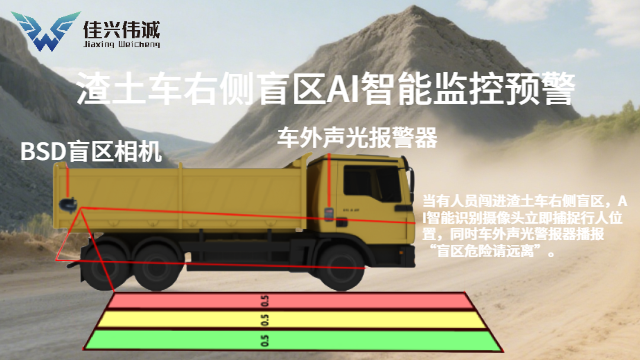
露天礦大型自卸車在礦區主干道行駛時,車長超 10 米、車寬超 5 米,車身兩側及后方的盲區極易隱藏其他礦車或作業人員。佳興偉誠的礦車 360 全景盲區監測預警系統,在車頭保險杠、貨廂兩側及車尾安裝高清防爆攝像頭,配合間隔分布的超聲波雷達。當有小型礦用皮卡從側方盲區駛來,雷達先于攝像頭 0.3 秒探測到移動目標,系統立即在全景畫面中用橙色框標記,并發出一級預警聲;若作業人員靠近車身 3 米范圍,雷達穿透粉塵識別,攝像頭同步捕捉畫面,觸發二級警報,駕駛室內的警示燈對應方向閃爍,讓駕駛員在礦區復雜路況下提前避讓,大幅降低碰撞風險。特種車360全景駕駛輔助系統可根據不同車型定制化安裝,無需大規模改造車...
-
 保定石油工程車360全景服務商
保定石油工程車360全景服務商露天礦大型自卸車在礦區主干道行駛時,車長超 10 米、車寬超 5 米,車身兩側及后方的盲區極易隱藏其他礦車或作業人員。佳興偉誠的礦車 360 全景盲區監測預警系統,在車頭保險杠、貨廂兩側及車尾安裝高清防爆攝像頭,配合間隔分布的超聲波雷達。當有小型礦用皮卡從側方盲區駛來,雷達先于攝像頭 0.3 秒探測到移動目標,系統立即在全景畫面中用橙色框標記,并發出一級預警聲;若作業人員靠近車身 3 米范圍,雷達穿透粉塵識別,攝像頭同步捕捉畫面,觸發二級警報,駕駛室內的警示燈對應方向閃爍,讓駕駛員在礦區復雜路況下提前避讓,大幅降低碰撞風險。支持 5G 網絡傳輸,佳興偉誠工程車 360 全景畫面可實時同步至遠程...
-
呼倫貝爾路橋工程車360全景定制
大型車輛因體積龐大、駕駛視野受限,盲區引發的安全事故頻發,360 度全景盲區無死角監測預警系統的出現,為解決這一難題提供了高效方案。該系統通過在車輛前后左右部署多枚超廣角高清攝像頭,采集集車身周圍的環境影像,經先進的圖像拼接與畸變矯正技術處理,在駕駛室內的顯示屏上生成 360 度無死角的全景鳥瞰圖,讓駕駛員能清晰掌握車輛周邊狀況,徹底消除傳統駕駛中的視覺盲區。系統不具備全景可視化功能,還集成了智能監測與預警機制。借助 AI 算法,它能識別行人、非機動車及其他障礙物,當檢測到物體進入危險區域時,立即通過聲音報警、燈光閃爍等方式提醒駕駛員,部分系統還可聯動車輛制動系統,實現緊急減速或停車,大限度降...
-
 巴彥淖爾360全景多少錢
巴彥淖爾360全景多少錢在挖掘機復雜多變的作業場景中,龐大的動臂、旋轉的上車體、以及狹窄的作業空間共同構筑了難以逾越的視野盲區“雷區”。佳興偉誠挖掘機360全景盲區監測駕駛輔助系統,正是為解決這一行業痛點而生。系統采用高防護魚眼攝像頭,精密部署于動臂根部、駕駛室頂部、配重尾部及底盤兩側。佳興偉誠獨有的高速圖像處理芯片,瞬間完成畸變校正與六路視頻無縫拼接,生成實時俯視全景圖,將曾經“看不見”的區域徹底暴露于操作手眼前。在管溝挖掘中,系統動態顯示鏟斗與溝壁的精確距離及預估落點;在建筑物拆除時,全景視圖清晰呈現回轉半徑內鋼筋、管線的位置,避免勾掛;在物料裝卸時,后方自卸車的相對位置與高度一目了然。尤為關鍵的是,系統關鍵在于...
-
北京石油工程車360全景
混凝土泵車作業時,巨大的臂架展開猶如擎天之柱,其下方及周邊區域存在嚴重的視覺盲區,對現場人員安全構成巨大威脅。佳興偉誠工程車輛360全景駕駛輔助系統,專為解決泵車這一痛點而生。系統攝像頭不覆蓋車體底盤四周(重點監控支腿區域、車頭車尾),更創新性在關鍵臂架節點(如轉塔、1號臂根部)部署,通過佳興偉誠特有的多視角融合技術,將車身周圍地面狀況與臂架下方實時畫面整合呈現于駕駛室屏幕。操作手在操作遙控器或駕駛室內,即可清晰掌握支腿下方是否堅實平整、有無人員設備滯留、鋼筋網是否妨礙布管、臂架與臨近建筑物或高壓線的安全距離。系統可設置動態安全警戒區域,當人員或設備進入臂架下方高危區域時自動觸發聲光報警,為“...