甌海區電機
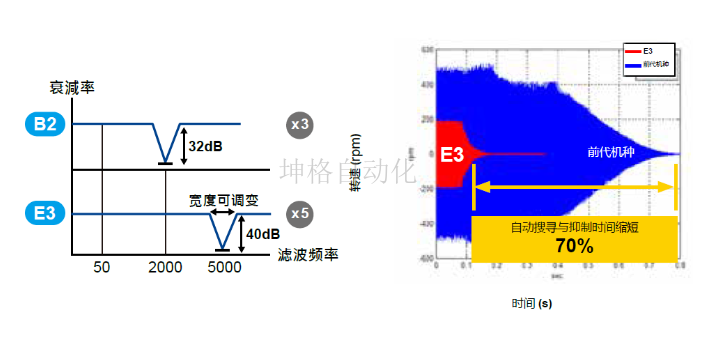
伺服電機與步進電機低頻特性不同步進電機在低速時易出現低頻振動現象。振動頻率與負載情況和驅動器性能有關,一般認為振動頻率為電機空載起跳頻率的一半。這種由步進電機的工作原理所決定的低頻振動現象對于機器的正常運轉非常不利。當步進電機工作在低速時,一般應采用阻尼技術來克服低頻振動現象,比如在電機上加阻尼器,或驅動器上采用細分技術等。交流伺服電機運轉非常平穩,即使在低速時也不會出現振動現象。交流伺服系統具有共振抑制功能,可涵蓋機械的剛性不足,并且系統內部具有頻率解析機能(FFT),可檢測出機械的共振點,便于系統調整。伺服電機,就選溫州坤格自動化科技有限公司,讓您滿意,歡迎您的來電!甌海區電機

而慣量描述的是物體運動的慣性,轉動慣量是物體繞軸轉動慣性的度量。轉動慣量只跟轉動半徑和物體質量有關。一般負載慣量超過電機轉子慣量的10倍,可以認為慣量較大。導軌和絲杠的轉動慣量對伺服電機傳動系統的剛性影響很大,固定增益下,轉動慣量越大,剛性越大,越易引起電機抖動;轉動慣量越小,剛性越小,電機越不易抖動。可通過更換較小直徑的導軌和絲桿減小轉動慣量從而減小負載慣量來達到電機不抖動。我們知道通常在伺服系統選型時,除考慮電機的扭矩和額定速度等等參數外,我們還需要先計算得知機械系統換算到電機軸的慣量,再根據機械的實際動作要求及加工件質量要求來具體選擇具有合適慣量大小的電機。在調試時(手動模式下),正確設定慣量比參數是充分發揮機械及伺服系統效能的前提。那到底什么是“慣量匹配”呢?其實也不難理解,根據牛二定律:進給系統所需力矩=系統轉動慣量J×角加速度θ角加速度θ影響系統的動態特性,θ越小則由控制器發出指令到系統執行完畢的時間越長,系統反應越慢。如果θ變化,則系統反應將忽快忽慢,影響加工精度。伺服電機選定后極限大輸出值不變,如果希望θ的變化小,則J就應該盡量小。樂清永磁同步電機哪里好溫州坤格自動化科技有限公司是一家專業提供伺服電機的公司,歡迎新老客戶來電!
伺服電機選型步驟一、轉速和編碼器分辨率的確認。二、電機軸上負載力矩的折算和加減速力矩的計算。三、計算負載慣量,慣量的匹配,安川伺服電機為例,部分產品慣量匹配可達50倍,但實際越小越好,這樣對精度和響應速度好。四、再生電阻的計算和選擇,對于伺服,一般2kw以上,要外配置。五、電纜選擇,編碼器電纜雙絞屏蔽的,對于安川伺服等日系產品絕對值編碼器是6芯,增量式是4芯。伺服電機三種制動方式1電磁制動,2再生制動,3動態制動。動態制動器由動態制動電阻組成,在故障、急停、電源斷電時通過能耗制動縮短伺服電機的機械進給距離。再生制動是指伺服電機在減速或停車時將制動產生的能量通過逆變回路反饋到直流母線,經阻容回路吸收。電磁制動是通過機械裝置鎖住電機的軸.
什么是伺服電機抱閘?伺服電機抱閘指的是一種防止伺服電機在停止運轉時繼續轉動的裝置。它可以控制電機的運動狀態,防止電機出現危險或意外損壞。伺服電機抱閘是如何實現的呢?其實原理比較簡單,就是通過電磁力控制制動器的活動。制動器的工作原理是利用磁鐵的吸力使其與主體固定在一起,從而實現制動。在啟動伺服電機時,電磁力會消除制動器的制動,伺服電機就可以正常運行了。而在停止伺服電機時,電磁力會重新發揮作用,使制動器重新制動,從而防止電機繼續旋轉。伺服電機抱閘裝置有很多優點,其中重要的是它可以提高機械設備的安全性。當機械設備出現異常,如故障、斷電或其它狀況時,伺服電機抱閘就能及時發揮作用,使設備停止運轉,從而避免危險。此外,伺服電機抱閘還可以實現快速剎車,從而使機械設備停止運轉的速度更快,進一步降低安全風險。總之,伺服電機抱閘原理是通過控制制動器的的工作狀態,防止機械設備在停機時繼續旋轉,從而提高設備的安全性和運行效率。在實際應用中,我們應充分利用伺服電機抱閘的優點,保障機械設備的安全和穩定運行。溫州坤格自動化科技有限公司為您提供伺服電機,有想法的不要錯過哦!
伺服電機與步進電機矩頻特性不同步進電機的輸出力矩隨轉速升高而下降,且在較高轉速時會急劇下降,所以其最高工作轉速一般在300~600RPM。交流伺服電機為恒力矩輸出,即在其額定轉速(一般為2000RPM或3000RPM)以內,都能輸出額定轉矩,在額定轉速以上為恒功率輸出。步進電機的輸出力矩隨轉速升高而下降,且在較高轉速時會急劇下降,所以其最高工作轉速一般在300~600RPM。交流伺服電機為恒力矩輸出,即在其額定轉速(一般為2000RPM或3000RPM)以內,都能輸出額定轉矩,在額定轉速以上為恒功率輸出。溫州坤格自動化科技有限公司為您提供 伺服電機。平陽速度控制電機廠商
溫州坤格自動化科技有限公司是一家專業提供伺服電機的公司。甌海區電機
1、發展趨勢預測:智能化和數字化中國制造2025力度空前,關鍵部件的國產化突破是工控領域下一步發展的重中之重。2015年5月國家發布《中國制造2025》,旨在應對新技術沖擊,推動傳統制造業向高附加值制造業跨越式發展,而關鍵部件的國產化突破是提高智能制造水平,實施工業強基工程的重要任務。其中高精度數控機床、機器人和新能源汽車的開發作為重點突破領域,突出強調要加快突破伺服電機及驅動器等關鍵零部件的技術瓶頸。新的《第十四個五年規劃和2035年遠景目標綱要》中也明確提出要加快提升重點研制分散式控制系統、可編程邏輯控制器、數據采集和視頻監控系統等工業控制裝備,突破先進控制器、高精度伺服驅動系統、高性能減速器等智能機器人關鍵技術。預計未來我國伺服電機行業將快速發展,而主要發展趨勢預計如下:甌海區電機
- 泰順節能電機報價 2025-06-21
- 文成臺達電機供應商 2025-06-21
- 洞頭區永磁同步電機哪家好 2025-06-21
- 永磁同步電機廠商 2025-06-21
- 甌海區電機 2025-06-21
- 麗水水泵伺服電機哪家好 2025-06-21
- 文成位置控制電機廠家 2025-06-21
- 永嘉追剪電機哪種好 2025-06-21
- 鹿城區節能電機 2025-06-21
- 瑞安同步磁阻電機服務商 2025-06-21
- 浙江智能超聲波分散哪里有賣的 2025-06-21
- 陜西抗風浪網箱廠家 2025-06-21
- 河南抗風浪網箱公司 2025-06-21
- 深圳定做桌面型雕刻機設計 2025-06-21
- 東莞新能源省電空調廠家 2025-06-21
- 宜昌輪胎式蜘蛛車參考價 2025-06-21
- 南京超聲波點焊機性能 2025-06-21
- 廣州鋁合金真空腔體 2025-06-21
- 無錫切割機企業 2025-06-21
- 青浦區本地管式膜廠家電話 2025-06-21